Reddit mentions: The best electric motors
We found 378 Reddit comments discussing the best electric motors. We ran sentiment analysis on each of these comments to determine how redditors feel about different products. We found 192 products and ranked them based on the amount of positive reactions they received. Here are the top 20.
1. ENERLITES Countdown Timer Switch for bathroom fans and household lights, 1-5-10-15-20-30 Min Settings with Manual Override, Always On Blue LED, Neutral Wire Required, UL Listed, HET06A-R, White
- Automate the shut off operations of all types of lights including LEDs, CFLs, fans and heaters at the time pre-set
- Six pre-set options: 1min, 5min, 10min, 15min, 20min or 30min; Simply push the button to set countdown time preference
- Replaces standard in wall light switches, fan switches or spring loaded timers for energy saving, convenience and lighting and fan control
- Blue LED light STAYS ON, easy to locate in darkness. Ideal for bathroom, closet, pantry, garage, laundry room, spa; Due to the bright LED light, bedrooms are not recommended for this feature
- Specifications: UL Listed, NEUTRAL WIRE REQUIRED, supports LED/CFL: Incandescent: 800W, Fluorescent: 800VA light bulbs , Motor: 1/4 HP, Single Pole Switch. Wall Plate sold separately
Features:

Specs:
| Color | White |
| Height | 2.75 Inches |
| Length | 1.7 Inches |
| Weight | 0.54 Pounds |
| Width | 1.47 Inches |
| Release date | October 2017 |
| Size | 1 Pack |
| Number of items | 1 |
2. STEPPERONLINE Nema 17 Stepper Motor Bipolar 2A 59Ncm(84oz.in) 48mm Body 4-lead W/ 1m Cable and Connector compatible with 3D Printer/CNC
- 3D printer motor with high torque
- 59Ncm(83.6oz.in) holding torque
- NEMA 17 bipolar 1.65"x1.65"x1.89" 4-wire
- Build with 39.37"( 1m) Cable and 0.1" pitch Connector
- Rated current 2.0A & resistance 1.4ohms
Features:

Specs:
| Height | 1.88976 Inches |
| Length | 1.65354 Inches |
| Weight | 0.88 Pounds |
| Width | 1.65354 Inches |
| Size | 1.65"x1.65" |
| Number of items | 1 |
3. (3 Pack) NEMA 17 Steel and Rubber Stepper Motor Vibration Damper + M3 Screws - CNC, 3D Printer
- (3) NEMA 17 motor dampers
- (6) M3 5mm steel screws
Features:

Specs:
| Weight | 0.099375 Pounds |
| Number of items | 1 |
4. Qunqi L298N Motor Drive Controller Board Module Dual H Bridge DC Stepper For Arduino
- Dual-channel H-bridge driver working mode creates higher working efficiency,L298N as main chip.Can drive one 2-phase stepper motor, one 4-phase stepper motor or two DC motors.
- To avoid damage the voltage stabilizing chip, please use an external 5V logic supply when using more than 12V driving voltage
- Use large-capacity filter capacitors and diode with freewheeling protection function, increasing reliability
- High working power to 35v,large current can reach 3A MAX and continue current is 2A, power to 25w.
- Large capacity filter capacitance,afterflow protection diode, more stable and reliable.
Features:

Specs:
| Height | 0.7480314953 Inches |
| Length | 1.1417322823 Inches |
| Weight | 0.07 Pounds |
| Width | 0.9842519675 Inches |
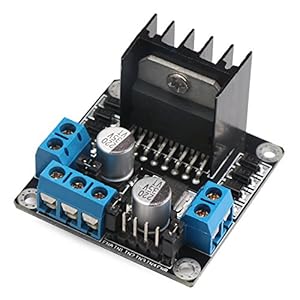
5. L298N H-bridge Motor Controller, DROK L298N Motor Driver Board DC Dual H Bridge Robot Stepper Motor Regulator and Drives Module for Arduino Smart Car Power UNO MEGA R3 Mega2560 Duemilanove
DROK L298N h-bridge motor controller working mode creates higher working efficiency, L298N as main chip, ST corporation production. Can drive one 2-phase stepper motor, one 4-phase stepper motor or two DC motors.To avoid damage the voltage stabilizing chip, please use an external 5V logic supply whe...
Specs:
| Height | 5.5 Inches |
| Length | 7 Inches |
| Weight | 0.06625 Pounds |
| Width | 1.5 Inches |
| Size | L289N |
| Number of items | 1 |
6. RioRand RR-PWM-15V Low Voltage Dc 1.8v 3v 5v 6v 12v 2a Motor Speed Controller Pwm,
Low Voltage DC 1.8V 3V 5V 6V 12V 2AMotor Speed Controller PWMThe maximum output power: 30WDuty Cycle adjustable: 0%-100%

Specs:
| Color | 2A PWM |
| Height | 0.7 Inches |
| Length | 3.5 Inches |
| Weight | 0.02 Kilograms |
| Width | 2.1 Inches |
| Number of items | 1 |
7. uxcell a11101800ux0165 DC 3V 1100RPM 0.2A High Speed Mini Vibration Motor for DIY Toys
- Product Name : Vibration Motor;Voltage : DC 3V
- Current : 0.2A;Speed : 1100RPM
- Diameter : 6mm/0.23";Size Spec. : 6 x 17mm/0.23" x 0.66"(D*L)
- Cable Length : 2cm/0.79";Net Weight : 3g
- Package Content : 1 x Mini Vibration Motor
Features:

Specs:
| Color | 3V |
| Height | 0.79 Inches |
| Length | 2.36 Inches |
| Weight | 0.01 Pounds |
| Width | 1.18 Inches |
| Size | 1100RPM |
8. Thermaltake Riing Trio 12 RGB TT Premium Edition 120mm Software Enabled 30 Addressable LED 9 Blades Case/Radiator Fan - 3 Pack - CL-F072-PL12SW-A
- AMAZON ALEXA Control lights or fan speed by talking to Amazon Alexa enabled devices , Fan Rated Voltage 12 Volts and 5Volts
- TT RGB PLUS Software/App Monitor performance, adjust fan speeds, and customize lighting effects
- LIGHTING SCHEMES Switch between 16 “Light Mode” (Twinkle, Firefly, Heartbeat, Stack, Roundabout, Swirl, Copy Color, Full Lighted, Sound Control, Flow, RGB Spectrum, Ripple, Blink, Pulse, Wave, and Thermal) along with 3 'Color Modes' (RGB, Single and Off) and 4 'Light Speeds' (Slow, Normal, Fast and Extreme) via TT RGB PLUS Software
- WORLD’S 1ST 3 INDEPENDENT 16.8 MILLION COLORS LED RING 30 addressable LEDs each fan for endless color customization (Front: 12 / Middle: 6 / Back: 12)
- 9 FAN BLADE DESIGN 120mm with 9 blade design to generate high airflow with ultra silent operation
- LOW NOISE HYDRAULIC BEARING Self lubricating lowers the noise. While seal cap prevents lubricant leakage, extends the lifespan as well
- ANTI VIBRATION MOUNTING In mold rubber pads at 4 corners absorb the vibration, as well as protecting corners from damage
- DIGITAL LIGHTING CONTROLLER – Add up to 5 devices to 1 controller and up to 16 controller to TT RGB PLUS software
Features:

Specs:
| Color | Black |
| Height | 0.98 Inches |
| Length | 4.72 Inches |
| Weight | 0.37 Pounds |
| Width | 4.72 Inches |
| Release date | July 2018 |
| Size | 120mm |
| Number of items | 1 |
9. RioRand 7-70V PWM DC Motor Speed Controller Switch 30A
Potentiometer cable(about 15CM) can be separated, with running stop brake functionSuitable for long hours of work:Circuit optimization design,stableAdjust the motor smooth no noise no vibration,with power indication,wide duty cycle adjustment rangeUsing imported high-voltage MOS tube, three pres...

Specs:
| Color | Green |
| Height | 1.4 Inches |
| Length | 3.4 Inches |
| Width | 2.3 Inches |
| Number of items | 1 |
10. STEPPERONLINE 0.9deg Nema 17 Stepper Motor Bipolar 0.9A 36Ncm/50oz.in 42x42x39mm 4-wires DIY

Specs:
| Height | 1.5748 Inches |
| Length | 1.65354 Inches |
| Weight | 0.6172943336 Pounds |
| Width | 1.65354 Inches |
11. uxcell DC 12V 15RPM 6mm Shaft High Torque Turbine Worm Geared Motor
Product Name: Geared Motor; Rated Voltage: DC 12V; Output Speed: 5000/15RPM;No-load Current:40mA; Rated Torque:3kg.cm; Rated Current:300mA;Stall Torque:10kg.cm;Motor Rotary Speed: 5000RPM; Motor Pins Numbe: 2; Gear Box Shaft Speed: 15RPMBox Shaft Size: 6 x 14mm/ 0.24" x 0.55"(D*L); Female Thread Dia...
 ▼ Read Reddit mentions
▼ Read Reddit mentions12. (5 Pack) NEMA 17 Steel and Rubber Stepper Motor Vibration Damper + M3 Screws - CNC, 3D Printer
- (5) NEMA 17 motor dampers
- (10) M3 5mm steel screws
Features:
Specs:
| Number of items | 1 |
13. STEPPERONLINE CNC Stepper Motor Driver 1.0-4.2A 20-50VDC 1/128 Micro-Step Resolutions for Nema 17 and 23 Stepper Motor
- Stepper motor driver DM542T is updated to version V4.0, add 5V/24V logical voltage selector, alarm outputs. Please attension, Factory setting is 24V, if you need to use 5V, switch selector on the top of the driver.
- Industrial-grade Stepper Driver, Suit for Nema 17 and 23 Stepper Motor
- 1.0~4.2A, 20~50VDC, 1/128 Microstep Resolution
- Pulse signal: 4-5V when PUL-HIGH, 0-0.5V whenPUL-LOW. The same as DIR and ENA signals
- 100% service satisfactory. We provided this stepper motor kit with 30 days free replacement or refund, 1 year warranty and whole life customer service from the date of purchasing.
Features:

Specs:
| Weight | 0.4629707502 Pounds |
14. uxcell 5pcs DC3V/0.1A 1.5V/0.05A 10x2.7mm Coin Mobile Phone Vibration Motor
- Product Name : DC Vibration Motor;Rated Voltage & Current : DC 3V,0.1ADC 1.5V, 0.05A
- Body Size : 10x 2.7mm/ 0.4" x 0.1" (D*T);Cable Length : 9.5cm/ 3.7"
- Main Color : Silver Tone;Material : Metal
- Net Weight : 6g
- Package : 5 x DC Vibration Motor
Features:

Specs:
| Height | 0.11 Inches |
| Length | 4.13 Inches |
| Weight | 0.021 Pounds |
| Width | 0.39 Inches |
15. uniquegoods 6V 12V 24V Digital Display LED DC Motor Speed Controller PWM Stepless Speed Control Switch HHO Driver - Black CCM5D
- Input supply voltage: 6V-30V DC
- PWM frequency: 16kHz; Duty Cycle adjustable: 0%-100%
- Item size: 3.1*1.6*0.9 inches ; Net weight: 2.1 ounces
- The maximum output power: 240W
- The maximum continuous output current :5A;(Peak current 8A),The LED display the duty ratio 0-100%
Features:

Specs:
| Height | 1.6 Inches |
| Length | 3.1 Inches |
| Weight | 0.13125 Pounds |
| Width | 0.9 Inches |
16. KB Electronics 8811006 Solid State Variable Speed AC Electric Motor Control, 2.5 Max amp, 115V, # K177-1002
- Designed for Standard 2" x 4" Electrical Wall Box
- 2.5 Max amps 115 Volts; UL & CSA Approved
- Not to be used with Capacitor Start or Capacitor Run Motors
- Applications: Fans, Blowers, Fireplace Blowers, Attic Fans, Humidifiers, Ventilators
Features:

Specs:
| Weight | 0.01 Pounds |
| Size | 2.5 Amp |
| Number of items | 1 |
17. High Torque Nema 23 CNC Stepper Motor 114mm 425oz.in/3Nm CNC Mill Lathe Router
Very Huge Torque3Nm(425oz.in) holding torqueNEMA 23 bipolar 2.24"x2.24"x4.45" 4-wire1.8 deg. step angle(200 steps/rev)Rated current 4.2A & resistance 0.9ohms

Specs:
| Height | 2.24409 Inches |
| Length | 2.24409 Inches |
| Weight | 3.69 pounds |
| Width | 4.44881 Inches |
18. KB Electronics 8811012 Solid State Variable Speed AC Electric Motor Control, 5.0 Max amp, 115V, # K177-1005
- Designed for Standard 2" x 4" Electrical Wall Box
- 5.0 Max amps 115 Volts; UL & CSA Approved
- Not to be used with Capacitor Start or Capacitor Run Motors
- Applications: Fans, Blowers, Fireplace Blowers, Attic Fans, Humidifiers, Ventilators
Features:

Specs:
| Weight | 0.31 Pounds |
| Size | 5.0 Amp |
| Number of items | 1 |
19. Nite Ize F9L-02-01 NiteIze-Figure 9 Large-Single Pack, Black
TIGHTEN + TENSION ROPES WITHOUT USING KNOTS - The award-winning design of our Figure 9s allow you to tension ropes and lines without using any knots or complicated techniquesLASER ENGRAVED, EASY-TO-FOLLOW INSTRUCTIONS - Instructions printed right on the aluminum Figure 9 guide you through looping yo...

Specs:
| Color | Black |
| Height | 8 Inches |
| Length | 6 Inches |
| Weight | 0.06393405598 Pounds |
| Width | 0.5 Inches |
| Size | Large |
| Number of items | 1 |
🎓 Reddit experts on electric motors
The comments and opinions expressed on this page are written exclusively by redditors. To provide you with the most relevant data, we sourced opinions from the most knowledgeable Reddit users based the total number of upvotes and downvotes received across comments on subreddits where electric motors are discussed. For your reference and for the sake of transparency, here are the specialists whose opinions mattered the most in our ranking.
Interested in what Redditors like? Check out our Shuffle feature
Shuffle: random products popular on RedditTop Reddit comments about Electric Motors:
Summary
1. ENERLITES Countdown Timer Switch for bathroom fans and household lights, 1-5-10-15-20-30 Min Settings with Manual Override, Always On Blue LED, Neutral Wire Required, UL Listed, HET06A-R, White
- Automate the shut off operations of all types of lights including LEDs, CFLs, fans and heaters at the time pre-set
- Six pre-set options: 1min, 5min, 10min, 15min, 20min or 30min; Simply push the button to set countdown time preference
- Replaces standard in wall light switches, fan switches or spring loaded timers for energy saving, convenience and lighting and fan control
- Blue LED light STAYS ON, easy to locate in darkness. Ideal for bathroom, closet, pantry, garage, laundry room, spa; Due to the bright LED light, bedrooms are not recommended for this feature
- Specifications: UL Listed, NEUTRAL WIRE REQUIRED, supports LED/CFL: Incandescent: 800W, Fluorescent: 800VA light bulbs , Motor: 1/4 HP, Single Pole Switch. Wall Plate sold separately
Features:
Specs:
| Color | White |
| Height | 2.75 Inches |
| Length | 1.7 Inches |
| Weight | 0.54 Pounds |
| Width | 1.47 Inches |
| Release date | October 2017 |
| Size | 1 Pack |
| Number of items | 1 |
2. STEPPERONLINE Nema 17 Stepper Motor Bipolar 2A 59Ncm(84oz.in) 48mm Body 4-lead W/ 1m Cable and Connector compatible with 3D Printer/CNC
- 3D printer motor with high torque
- 59Ncm(83.6oz.in) holding torque
- NEMA 17 bipolar 1.65"x1.65"x1.89" 4-wire
- Build with 39.37"( 1m) Cable and 0.1" pitch Connector
- Rated current 2.0A & resistance 1.4ohms
Features:
Specs:
| Height | 1.88976 Inches |
| Length | 1.65354 Inches |
| Weight | 0.88 Pounds |
| Width | 1.65354 Inches |
| Size | 1.65"x1.65" |
| Number of items | 1 |
3. (3 Pack) NEMA 17 Steel and Rubber Stepper Motor Vibration Damper + M3 Screws - CNC, 3D Printer
- (3) NEMA 17 motor dampers
- (6) M3 5mm steel screws
Features:
Specs:
| Weight | 0.099375 Pounds |
| Number of items | 1 |
4. Qunqi L298N Motor Drive Controller Board Module Dual H Bridge DC Stepper For Arduino
- Dual-channel H-bridge driver working mode creates higher working efficiency,L298N as main chip.Can drive one 2-phase stepper motor, one 4-phase stepper motor or two DC motors.
- To avoid damage the voltage stabilizing chip, please use an external 5V logic supply when using more than 12V driving voltage
- Use large-capacity filter capacitors and diode with freewheeling protection function, increasing reliability
- High working power to 35v,large current can reach 3A MAX and continue current is 2A, power to 25w.
- Large capacity filter capacitance,afterflow protection diode, more stable and reliable.
Features:
Specs:
| Height | 0.7480314953 Inches |
| Length | 1.1417322823 Inches |
| Weight | 0.07 Pounds |
| Width | 0.9842519675 Inches |
5. L298N H-bridge Motor Controller, DROK L298N Motor Driver Board DC Dual H Bridge Robot Stepper Motor Regulator and Drives Module for Arduino Smart Car Power UNO MEGA R3 Mega2560 Duemilanove
DROK L298N h-bridge motor controller working mode creates higher working efficiency, L298N as main chip, ST corporation production. Can drive one 2-phase stepper motor, one 4-phase stepper motor or two DC motors.To avoid damage the voltage stabilizing chip, please use an external 5V logic supply whe...
Specs:
| Height | 5.5 Inches |
| Length | 7 Inches |
| Weight | 0.06625 Pounds |
| Width | 1.5 Inches |
| Size | L289N |
| Number of items | 1 |
6. RioRand RR-PWM-15V Low Voltage Dc 1.8v 3v 5v 6v 12v 2a Motor Speed Controller Pwm,
Low Voltage DC 1.8V 3V 5V 6V 12V 2AMotor Speed Controller PWMThe maximum output power: 30WDuty Cycle adjustable: 0%-100%
Specs:
| Color | 2A PWM |
| Height | 0.7 Inches |
| Length | 3.5 Inches |
| Weight | 0.02 Kilograms |
| Width | 2.1 Inches |
| Number of items | 1 |
7. uxcell a11101800ux0165 DC 3V 1100RPM 0.2A High Speed Mini Vibration Motor for DIY Toys
- Product Name : Vibration Motor;Voltage : DC 3V
- Current : 0.2A;Speed : 1100RPM
- Diameter : 6mm/0.23";Size Spec. : 6 x 17mm/0.23" x 0.66"(D*L)
- Cable Length : 2cm/0.79";Net Weight : 3g
- Package Content : 1 x Mini Vibration Motor
Features:
Specs:
| Color | 3V |
| Height | 0.79 Inches |
| Length | 2.36 Inches |
| Weight | 0.01 Pounds |
| Width | 1.18 Inches |
| Size | 1100RPM |
8. Thermaltake Riing Trio 12 RGB TT Premium Edition 120mm Software Enabled 30 Addressable LED 9 Blades Case/Radiator Fan - 3 Pack - CL-F072-PL12SW-A
- AMAZON ALEXA Control lights or fan speed by talking to Amazon Alexa enabled devices , Fan Rated Voltage 12 Volts and 5Volts
- TT RGB PLUS Software/App Monitor performance, adjust fan speeds, and customize lighting effects
- LIGHTING SCHEMES Switch between 16 “Light Mode” (Twinkle, Firefly, Heartbeat, Stack, Roundabout, Swirl, Copy Color, Full Lighted, Sound Control, Flow, RGB Spectrum, Ripple, Blink, Pulse, Wave, and Thermal) along with 3 'Color Modes' (RGB, Single and Off) and 4 'Light Speeds' (Slow, Normal, Fast and Extreme) via TT RGB PLUS Software
- WORLD’S 1ST 3 INDEPENDENT 16.8 MILLION COLORS LED RING 30 addressable LEDs each fan for endless color customization (Front: 12 / Middle: 6 / Back: 12)
- 9 FAN BLADE DESIGN 120mm with 9 blade design to generate high airflow with ultra silent operation
- LOW NOISE HYDRAULIC BEARING Self lubricating lowers the noise. While seal cap prevents lubricant leakage, extends the lifespan as well
- ANTI VIBRATION MOUNTING In mold rubber pads at 4 corners absorb the vibration, as well as protecting corners from damage
- DIGITAL LIGHTING CONTROLLER – Add up to 5 devices to 1 controller and up to 16 controller to TT RGB PLUS software
Features:
Specs:
| Color | Black |
| Height | 0.98 Inches |
| Length | 4.72 Inches |
| Weight | 0.37 Pounds |
| Width | 4.72 Inches |
| Release date | July 2018 |
| Size | 120mm |
| Number of items | 1 |
9. RioRand 7-70V PWM DC Motor Speed Controller Switch 30A
Potentiometer cable(about 15CM) can be separated, with running stop brake functionSuitable for long hours of work:Circuit optimization design,stableAdjust the motor smooth no noise no vibration,with power indication,wide duty cycle adjustment rangeUsing imported high-voltage MOS tube, three pres...
Specs:
| Color | Green |
| Height | 1.4 Inches |
| Length | 3.4 Inches |
| Width | 2.3 Inches |
| Number of items | 1 |
10. STEPPERONLINE 0.9deg Nema 17 Stepper Motor Bipolar 0.9A 36Ncm/50oz.in 42x42x39mm 4-wires DIY
Specs:
| Height | 1.5748 Inches |
| Length | 1.65354 Inches |
| Weight | 0.6172943336 Pounds |
| Width | 1.65354 Inches |
11. uxcell DC 12V 15RPM 6mm Shaft High Torque Turbine Worm Geared Motor
Product Name: Geared Motor; Rated Voltage: DC 12V; Output Speed: 5000/15RPM;No-load Current:40mA; Rated Torque:3kg.cm; Rated Current:300mA;Stall Torque:10kg.cm;Motor Rotary Speed: 5000RPM; Motor Pins Numbe: 2; Gear Box Shaft Speed: 15RPMBox Shaft Size: 6 x 14mm/ 0.24" x 0.55"(D*L); Female Thread Dia...
▼ Read Reddit mentions12. (5 Pack) NEMA 17 Steel and Rubber Stepper Motor Vibration Damper + M3 Screws - CNC, 3D Printer
- (5) NEMA 17 motor dampers
- (10) M3 5mm steel screws
Features:
Specs:
| Number of items | 1 |
13. STEPPERONLINE CNC Stepper Motor Driver 1.0-4.2A 20-50VDC 1/128 Micro-Step Resolutions for Nema 17 and 23 Stepper Motor
- Stepper motor driver DM542T is updated to version V4.0, add 5V/24V logical voltage selector, alarm outputs. Please attension, Factory setting is 24V, if you need to use 5V, switch selector on the top of the driver.
- Industrial-grade Stepper Driver, Suit for Nema 17 and 23 Stepper Motor
- 1.0~4.2A, 20~50VDC, 1/128 Microstep Resolution
- Pulse signal: 4-5V when PUL-HIGH, 0-0.5V whenPUL-LOW. The same as DIR and ENA signals
- 100% service satisfactory. We provided this stepper motor kit with 30 days free replacement or refund, 1 year warranty and whole life customer service from the date of purchasing.
Features:
Specs:
| Weight | 0.4629707502 Pounds |
14. uxcell 5pcs DC3V/0.1A 1.5V/0.05A 10x2.7mm Coin Mobile Phone Vibration Motor
- Product Name : DC Vibration Motor;Rated Voltage & Current : DC 3V,0.1ADC 1.5V, 0.05A
- Body Size : 10x 2.7mm/ 0.4" x 0.1" (D*T);Cable Length : 9.5cm/ 3.7"
- Main Color : Silver Tone;Material : Metal
- Net Weight : 6g
- Package : 5 x DC Vibration Motor
Features:
Specs:
| Height | 0.11 Inches |
| Length | 4.13 Inches |
| Weight | 0.021 Pounds |
| Width | 0.39 Inches |
15. uniquegoods 6V 12V 24V Digital Display LED DC Motor Speed Controller PWM Stepless Speed Control Switch HHO Driver - Black CCM5D
- Input supply voltage: 6V-30V DC
- PWM frequency: 16kHz; Duty Cycle adjustable: 0%-100%
- Item size: 3.1*1.6*0.9 inches ; Net weight: 2.1 ounces
- The maximum output power: 240W
- The maximum continuous output current :5A;(Peak current 8A),The LED display the duty ratio 0-100%
Features:
Specs:
| Height | 1.6 Inches |
| Length | 3.1 Inches |
| Weight | 0.13125 Pounds |
| Width | 0.9 Inches |
16. KB Electronics 8811006 Solid State Variable Speed AC Electric Motor Control, 2.5 Max amp, 115V, # K177-1002
- Designed for Standard 2" x 4" Electrical Wall Box
- 2.5 Max amps 115 Volts; UL & CSA Approved
- Not to be used with Capacitor Start or Capacitor Run Motors
- Applications: Fans, Blowers, Fireplace Blowers, Attic Fans, Humidifiers, Ventilators
Features:
Specs:
| Weight | 0.01 Pounds |
| Size | 2.5 Amp |
| Number of items | 1 |
17. High Torque Nema 23 CNC Stepper Motor 114mm 425oz.in/3Nm CNC Mill Lathe Router
Very Huge Torque3Nm(425oz.in) holding torqueNEMA 23 bipolar 2.24"x2.24"x4.45" 4-wire1.8 deg. step angle(200 steps/rev)Rated current 4.2A & resistance 0.9ohms
Specs:
| Height | 2.24409 Inches |
| Length | 2.24409 Inches |
| Weight | 3.69 pounds |
| Width | 4.44881 Inches |
18. KB Electronics 8811012 Solid State Variable Speed AC Electric Motor Control, 5.0 Max amp, 115V, # K177-1005
- Designed for Standard 2" x 4" Electrical Wall Box
- 5.0 Max amps 115 Volts; UL & CSA Approved
- Not to be used with Capacitor Start or Capacitor Run Motors
- Applications: Fans, Blowers, Fireplace Blowers, Attic Fans, Humidifiers, Ventilators
Features:
Specs:
| Weight | 0.31 Pounds |
| Size | 5.0 Amp |
| Number of items | 1 |
19. Nite Ize F9L-02-01 NiteIze-Figure 9 Large-Single Pack, Black
TIGHTEN + TENSION ROPES WITHOUT USING KNOTS - The award-winning design of our Figure 9s allow you to tension ropes and lines without using any knots or complicated techniquesLASER ENGRAVED, EASY-TO-FOLLOW INSTRUCTIONS - Instructions printed right on the aluminum Figure 9 guide you through looping yo...
Specs:
| Color | Black |
| Height | 8 Inches |
| Length | 6 Inches |
| Weight | 0.06393405598 Pounds |
| Width | 0.5 Inches |
| Size | Large |
| Number of items | 1 |
Already a lot of great answers by clever people here! I can add a bit on motors and electricals, but I also want to say that you're probably underestimating how big a 3' arm is. Imagine that on your desk- it takes up half a table! Sizing the motors for static torque alone doesn't work well, as the inertia at the end effector increases with length^2 which is proportional to dynamic torque, speed, and vibration. Larger limb sections are also heavier and more complicated to make, which makes them even more heavy. Sizing down a little bit will make the arm dramatically more stable and performant.
> Belts or Gears for the actuators?
For 3 lb @ 35" you're looking at a minimum torque of 12.2 N-m at the shoulder. That will require reduction. Belts are far cheaper than gears, especially if you have a 3d printer- plastic pullys work great, although they need to be well glued to metal shafts (NB that a shaft key will greatly reduce strength and durability). Red loctite is great for that. A single belt reduction can do 5x, although you can do 10x+ with idlers. Mcmaster is a good place for belts, but amazon has a small selection that can be cheaper.
Note that belts can be very rigid: highly tensioned, fiber reinforced belts at moderate torque (otherwise the teeth start pulling out) are actually stiffer than most gears, which have a grease film and a gap between teeth that has a slight initial give/backlash. The reason you switch from belts to gears is because you need to tension the belts more tightly for higher torque. Once the tension becomes hard on the bearings and gearbox frame, you switch to gears. Basically you want to avoid gears if at all possible; they're expensive, hard to find, and hard to mount without metal backplates and the ability to cut bearing mounts. SDP/SI is a good place to get gears.
> Once I know how much torque I need, how do I know which type of motor is best for me? Stepper, Servo, Brushless?
Depends how much you want to spend. Hobby servos won't work for a 35" arm, even the $350 dynamixels. You also don't want to be designing your own brushless drivers, and the range of robotics controllers for bldc is limited. You are basically stuck between NEMA 23 and odrive.
NEMA 23 is the cheap choice- you can get very big NEMA 23s on amazon, hook them up to a single-stage 5x reduction, and have gobs of torque and good control. You can even get NEMA 34 for affordable prices. The drivers are stupidly cheap- for <$70 all-in you can have an arduino-controlled joint with 15 N-m of torque and top out solidly over 500 rpm. Add a couple heat sinks and you can increase that a lot- 500+ watts no problem, or 7 watts per dollar.
Downsides are you don't get any regen (not so important on an arm), low/no backdriveability (although this can be nice since the robot usually holds position when it turns off), very loud operation, low efficiency, and pretty low acceleration. Brushless motors require higher reduction and closed loop control, but are quiet, efficient, and can be used to build very responsive + high regen robots. Driving them is the weak link: the 56 V odrive dual driver cost a whopping $150. However for $70-80 per motor you get 40-90 amps continuous for 2 to 5 kilowatts, WITH regen and accuracy to >512 steps. That can be over 20 watts per dollar for the motor, reduction, sensors and driver. The limiting factor is even finding motors that can handle that power.
If your budget is <$500, go for steppers. If it's >$800, I'd go for brushless. You'll get an immense amount of speed and power, both of which are very good for an arm with a 3' reach. Note that 3' is a very large arm- the weight of the arm itself will be very limiting if you don't used fairly sophisticated techniques. 8"-12" sections are a hassle to 3d print. Rotational inertia increases with reach^2 so you'll need quadratically more power for the same acceleration (and to fight wobble). A 26" arm will require only half the power.
> Do I start my design from the end effector or do I start at the base?
I'd start at the end effector- that will set your payload weight and the torque required at the next joint, and so on back to the shoulder. Doing it the other way requires a lot more iteration.
The one thing I always say on posts like this is to learn how to use bearings. Bearings are the #1 cause of wobble in poorly designed arms, and the easiest way to tell if the designer had any clue what they were doing. Use 608 bearings for everything you can. They're incredibly cheap and precise because they're used in skateboards- 20 to 50 cents each. They're deep groove bearings, which are excellent for machinery, and can take 300 lbs radial and 150 lbs axial static load and 2-3x that for dynamic load. They're easily a 50x better value than any other types of bearings. If you want other bearings (maybe very large thin section) go to onlinebearingstore, despite having a 2000s era website/name they're really great. Unrelated, theoringstore is also really great.
The most important thing to know about bearings is that they always, always need a preload. The bearing will not meet specs if it does not have some axial force. It will have a very noticeable play and will wear out quickly. This is why you always use bearings in pairs- not because they can't take it, but because you can't preload a single bearing. You need two bearings to be pressed together. I like disc springs for this, but shims and even just bolts also work well for providing the axial force. You can usually just set your preload by feel (so make it possible to bolt down one bearing closer to the other), but if you want to do the math it's good to aim for an axial force of 50% of the maximum radial force you expect. That can come from static load, or torque from twisting the bearing.
Well thank you. Now I get to expand the text field to full size, so that's fun. Warning, this is gon' be long. You might wanna grab a snack, or start walking to get one if you're reading this on your phone. I've got a full bottle of Shandy, and another round of four Team Valor keychains to print, so I've got about an hour to blast this out.
Alright. We'll start from the top. First, I'll go with the basics, the hardware, and I'll work up from there.
So, the motors. The Tiko uses the 28BYJ-48 motor as its base. Running flat out, this motor can achieve 15 RPM, and output about 7% of the torque a typical NEMA17 shelled motor could. Now, you'll notice something. Compared to the NEMA17 I listed, the 28BYJ-48 is cheap. Really cheap. As in, five of them costs the same as one NEMA17. Due to this, a lot of people look at these motors and go "wow, these are just barely strong enough to move a carriage. I betcha I could make a printer out of this!" After a little bit of work, most people give up, or by the time they're done, they've realized exactly why everyone else did. See, the 28BYJ-48 is cheating. That torque, the one that literally is only barely pushing above a 20th of the power a normal motor does comes from a 1:64 gearbox made of plastic inside the casing. If the machine ever exceeds that force, the motors start to lose teeth faster than a hockey team. The Tiko team claims to have fixed this problem with a nylon gearbox. I have to tell you, with the experience I have using these motors, a nylon gearbox really isn't that much of an improvement. The plastic in there is already some tough stuff, and it's really only treating a symptom, not the problem. Keep in mind, the people at M3D have replaced the gearbox in their 28BYJ-48 powered printer (the only other printer to ever reach the market with these motors, by the way) with a metal one, and they're still blowing out.
To compound this, the team at Tiko, in their infinite wisdom, have decided to create a "unibody" printer. Meaning the linear motion is handled by its plastic body. I really don't have to explain why this is a bad idea. Combining a plastic gearbox with a plastic motion system is just begging for trouble. Printers really do need metal, just because plastic wears away. The Tiko team boasts "we've tested our printers for days, so we know they're durable!" But that's... That's not impressive. Given the time that can be expected from a typical printer, having a few days under the belt isn't something that matters a whole lot. Plastic wears down. That's what it does. If steel can get smooth patches rubbed into it from use, imagine what can happen to even the toughest polycarbonate.
But enough about the longevity of the device, let's talk quality. See, the Tiko is brilliantly priced. The Tiko is priced right at the range for people to say "well yeah, the prints aren't great, but what can you expect from something this cheap?" From your flair, you have a Maker Select. You know for a fact that cost doesn't really scale linearly with quality in printing. That thing can easily outclass a lot of machines five times its cost. This is because printers are tools, not electronics. Sure, they've got electric guts, but so does a drill, and you know that with a pretty damn cheap drill you can still make a good enough hole. The Tiko relies on being classified as a consumer electronic. They want to be classed like a cheap laptop, or a cheap phone, where "yeah it's not great, but hey, for the price..." But, yeah, for the price, the Monoprice Mini can kick ass and take names with a skilled operator. That's another fun thing. Their ultra-closed down control system keeps would-be tinkerers and hackers from actually using these things to their full potential, and their use of a proprietary firmware combined with a proprietary design means repairing and extending this thing is next to impossible. You, with a Maker Select, know that the extensions the community comes up with are the best part. The things missing out of the box on a lot of printers are a huge pain to work with. Imagine not having the option to add those. This is, in essence, the Tiko. The king of "well, yeah, but it works."
About those missing things. No layer fan. No heated bed. 30mm/s max "safe" movement speed. A layer fan on a PLA only device is kind of the ultimate must-have. You need that shit to bridge worth a crap, or print anything small, which is also important on a printer with such a small bed! That bed, being unheated, means that while they say it can use other materials, it kinda can't. Yes, PETG can be printed without a heated bed, yes, a lot of materials can be, but it's in the same way that you can make a cross country road trip on nothing but a mountain bike and a massive stockpile of turkey jerky. You can, but dear god, don't. Lastly, that low mm/s. That's a product of that 15RPM those poor motors are capable of. Bridging with no layer fan is hard at twice that speed, but at such a low speed, you're looking at major sagging. As in, just, don't make things with gaps in them. They claimed something about their titanium nozzle compensating in some way for this, but that literally makes no sense, and I honestly felt personally insulted when I read that. This brings me to my next point...
The people running Tiko seem to think they're the smartest people in any room. In one of their AMAs, I asked them why they used a leveling system that puts extra strain on already overtaxed motors, and they compared themselves to Elon Musk for some reason. This is a group of people not used to being called out to actually explain what they're doing. Every question is met with buzzwords and the conversational equivalent of jazzhands. Seriously. take a look at their AMAs. The utter contempt they seem to express for the community they're trying to enter is astounding. With such choice, juicy lines as "Open source is great, but it's time to leave the nest," they really solidified their reputation. The best part is that, despite closing everything they could about their printer, they're using a delta design. Delta printers are the most open line of printers there are. Almost entirely a priori from the rest of the printing industry, delta printers were spawned when a bunch of hardware hackers looked at an industrial robot and said "hey I betcha we could make that thing barf plastic into Yoda heads." So Tiko took every bit of the last half decade of work that's gone into the Rostock and Kossel designs that they could manage, and decided that contributing back to the community was for chumps. Like all of us, they stand on the shoulders of giants, but unlike everyone else, they chose to piss in their hair.
Speaking of that behaviour, that brings me to their litigiousness. In their first AMA, they opened by bragging about the law firm they'd hired to pursue "false innovators" (ironic) for copying anything they'd created. They claimed they needed to jealously guard every idea they'd ever had, and that this was how they'd succeed. When informed by /u/jebba (the CEO of Aleph Objects, AKA the guys that make the fucking LulzBot) that this behaviour really wasn't helpful in the printing industry, they redoubled their efforts, contending that these were to protect their work producing products in China. When informed by several people in the manufacturing industry that, haha, no, it's cool if you want to patent stuff, but the Chinese do not give a single solitary shit about if you have a patent or not when they rip stuff off, they stopped replying. But again, this is them positioning themselves to look like electronics, instead of tools. To people outside the industry, the idea that you need to guard your ideas closely and keep your code internal is commonplace. It's just how it's done in a lot of tech. But in printing, the best machines are open, and even ones that cost as much as a decent used car use firmware with almost 100% community developed code, and open slicers. Home printers developed in a way wholly alien to the rest of the tech world of the last two decades, radiating out with community development like the old home computer clubs, and even further back with home radios hand soldered together on wooden cutting boards (fun fact: that's where the word "breadboard" came from. Early home radios made by hackers were made with cutting boards as backing. Neat right?). Not centrally developed, and given to a begging public. Printers are the ultimate Bazaar and any attempts to drag them into a Cathedral should be met with hostility.
Alright, I think I could go on for a few more paragraphs, but this seems a good stopping point. If anyone who's bought a Tiko is reading this, I want you to know I sincerely hope you enjoy your purchase. That's not sarcasm. Printing is fantastic, and whatever you use, I'm glad you're here. Everyone loves their first printer, regardless of what it is, and I'm sure you'll get some great stuff from it if you give it some work. However, that doesn't change what I think about the company that made your product.
Yes, electronics can cost a lot, and many of the telescope manufacturers make things, that when I look at them belong in the 1990s or 2000s, in terms of the way they work, and honestly could have been $400. It's basically the TI calcuator system: https://xkcd.com/768/
People have replaced those control systems, using technology (especially things like improved stepper control) which has come about for various reasons, like 3D printers, and simply faster microcontrollers.
Here's one: https://www.youtube.com/watch?v=tCBgmgc8qiA conversion (I suspect based on that it was using one of the faster controllers, but mine can do fine with an Arduino Mega + Ramps (the cheap controller))
So At 408 + a bracket (Easy and simple 3D print or easy to DIY, look at the OnStep Showcase for a number of them.)
Along with a 1/4-20 screw and a dovetail (Oh look: https://www.thingiverse.com/thing:2039785) , and you've got all of the functionality of a one of the Star Adventurers, along with the ability to mount pretty much any telescope up to 8" with a vixen dovetail.
Plus, unlike from what I can tell of almost all commercial ones, they don't seem to compensate for misalignment when tracking. (Ie, they only move RA, not DEC, unless guiding.) Here are some examples of unguided long exposures with dual axis compensation. (Also, He doesn't usually process them, these are per other discussions straight off the camera) https://www.flickr.com/photos/11381732@N08/albums/72157683118306836
Though that uses PEC (Periodic error correction, because worm gears often have high/low spots, so it can be corrected by basically guiding a few times and storing the corrections, which are then replayed). If you want that stored, which isn't included on what I mentioned above, but can be added for the cost of a magnet or two and a hall sensor ( https://www.amazon.com/WINGONEER-Effect-KY-003-Magnetic-Arduino/dp/B06XHG9CYN/ $8 and magnet https://www.amazon.com/Personalized-Multi-Use-Whiteboard-Magnetic-Refrigerators/dp/B075PMV2BC/ $8 ) Otherwise you'd have to retrain it each time.
One thing is that the microcontroller and drivers aren't the most advanced, but you can upgrade them if you want. (STM32 about 3x as fast, but it's rarely needed, except for better alignment is about $60, but add two drivers, so call it a net of +$40 extra but that the kit adds wifi ($6 and a bit of wiring to the original) and a hand controller to it. the faster processors ESP32 and Teensy cost more but are something like 14x as fast allowing better alignment. Mind if you use Howard's Sky Planetarium, it won't matter too much, and it'll be able to process on the computer.)
All new, and unless you have space taken up as your main concern the above setup is in pretty much all respects better than that suggested by dan.
I am an absolute noob too, just two months ahead of you now.
These are the upgrades I am beyond happy that I got :D I'm gonna do two sections. One with upgrades you can buy and one with upgrades you can actually print!
Upgrades you can buy:
(Links mostly from Amazon for international convenience, but there's a chance you can get them cheaper/faster if you check webshops in your country):
- Vibration dampers! These will reduce the noise made by your printer by a LOT. I can actually sleep in the same room as my printer now. They can be installed on X, Y and the extruder, but I don't suggest the extruder, that can impact print quality.
https://www.amazon.com/Rubber-Stepper-Vibration-Damper-Screws/dp/B07415B39B/ref=sr_1_3?ie=UTF8&qid=1540932756&sr=8-3&keywords=ender+3+dampers
- Tougher steel springs for your bed leveling knobs. Bed leveling is an absolutely essential thing to get down for print quality(or even to be able to print at all), and the stock springs get worn fast. Before my replacements arrived, I had to re-level every 5 or so prints sometimes, and that just gets really old really fast. These springs should let you keep your bed level longer and wear out a LOT slower, and they're dirt cheap. Be aware that not all Ender 3 are made equal, so some springs might need to be tightened a lot while others barely need to be tightened. This means you might have to shorten a spring, and these are very tough so you'll need either a very tough cutter to cut them shorter or a grinder/metal saw/something that can assist you in cutting hard metal without ruining the spring)
https://www.amazon.co.uk/gp/product/B013G5I4US/ref=oh_aui_detailpage_o00_s00?ie=UTF8&psc=1
&#x200B;
- Glass bed. Don't question it. Your stock bed cover will break and it will break faster than you think. One bad print, one piece of filament that won't let go and you have a hole in the surface. Just get a glass bed as soon as you can afford it. You can go for the specialised glass or you can also just get a size cut mirror or window glass piece. But if you don't have glass cutters that will do it cheap nearby or can't cut glass yourself, there are plenty of stores that will sell you glass beds. Usually filament dealers have spare parts too. You can also print on tape or other things, and if you ask 10 different print enthusiasts, you'll get 10 different answers. But glass beds are supposedly good, will last you long and are super easy to clean off.
https://www.3dprima.com/parts/spare-parts/creality-3d/creality-3d-ender-3-build-surface-235x235mm-with-glass-fiber-plate-and-clips/a-23390/?Currency=DKK (Not from Amazon, I know)
&#x200B;
Upgrades you can print:
- LCD display back cover. The LCD display has no back cover for some weird-ass reason, and that is just inviting dust to come in and kill your expensive printer. But for the price of a little filament and 10 minutes of work, you can take care of that problem.
https://www.thingiverse.com/thing:2858209/
- Bottom fan guard. The bottom fan of the Ender 3 is an exposed sinkhole for loose filament bits, spiders, flying food and dropped screws. I don't think I need to explain why you don't want that stuff in your cooling fan. This will protect the fan and lead the airflow out instead of up. This should be one of the first things you print when you are ready to print actual real things.
https://www.thingiverse.com/thing:2935204
&#x200B;
&#x200B;
Many of my upgrades were from this article:
https://all3dp.com/1/20-must-creality-ender-3-upgrades-mods/
I definitely suggest giving that article a whirl, it has several other upgrades I'm eyeing when I can afford them.
Software suggestions:
Your first printing will likely be taking all the awesome models from Thingiverse and burning a spoon of filament on Luke Skywalker riding a dragon slaying Uther Pendragon. But eventually you might want to make your own models or at least try. These programs worked really well for me:
- Making technical parts. Fusion 360 is a Computer Assisted Drawing(CAD) program for 3D. It's made by Autodesk, and you can obtain a non-commercial license so it's entirely free and entirely legal. You can use this to make tools, boxes, parts, handles, replacement parts for things you have broken or whatever else. It specialises in precision, but you do not want to do sculpting or mesh work in this program as that's not what it was made for. I daresay it sucks the biggest, hairiest meatball if you try to use it for that.
- Mesh modification. You ever think "Wow, it would be cool to have a Batarang with a penis on it" but can't find it on Thingiverse? No worries. Meshmixer, also from Autodesk, is a simple program excellently suited for light modification of meshes as well as merging several mesh models together to make one(or splitting one up in multiple parts because it's too big). This still isn't the software to sculpt that intricite original design with a thousand details, but it is excellent for manipulating existing mesh models.
- Sculpting. Are you willing to spend $900? Then get ZBrush. If not, Blender is a pretty safe and free bet. It's an open source project and a pretty good 3D sculpting program. It has been known to cause migraines when you wanna learn to navigate it or work in it, but it is really a safe bet if you don't want to buy expensive software. Sculpting environments is where you take your idea for that sword with your initials, a demon skull and an edge spelling out the word "DOOM" in fancy curls.
&#x200B;
The software choices are another one of those things where everyone has an opinion, but this combination works really well for me, even if I am still just a beginner.
&#x200B;
On a final note:
Filament is not just filament. The same kind of filament is not even just the same kind of filament. And some filament can go bad if you store them wrong for longer periods of time. So if you use one spool of filament and think "Awesome!" and then you switch to another brand that acts totally different, that's not you being crazy. That's the unfortunate jungle of filaments. I'd say do some research of course, check out reviews and find a brand that works for you and stick to it like a clingy dog to a leg until you get your 3D printed sea legs and feel confident you can start trying out other brands without being scared if they're giving you worse prints. I ordered a spool of generic PLA filament from a brand I'm not entirely convinced actually exists, and it gave me prints that were orders of magnitude better than a PLA Pro filament from a named brand. Either my PLA Pro spool had gone bad before I got it, I'm stupid and couldn't figure out how to print it or Spectrum Filaments suck ass. I'm still not sure which, but it was far different from the generic "Should have been worthless" filament, and I made far better prints with my first filament.
&#x200B;
&#x200B;
Have fun with your printer! You are opening up a new world of awesomeness!
That's kinda what happens when you buy a cheap clone. However, we can attempt some simple remedies to fix this. We're gonna go all the way from the nozzle to the motor.
First of all, the nozzle needs to be checked out. Is it clean? Does it look blown out in any way? If it is, it will look like the one on the left, and not the one on the right https://i.redd.it/ziz8dqwamvbx.jpg Best way to clean your nozzle is to blowtorch it. There's really no other option if you're printing PLA.
Ok, the nozzle is fine, let's check out the heatbreak and heatblock. Is it restricted in any way? Take the entire thing apart and try and move some filament through the heatbreak by hand. Is there any resistance at all? There might be, if you ran your extruder too hot with a cheap clone and the PTFE tube melted a little bit (since I bet its not all metal, even if they advertise it that way).
Ok, all that's fine, is the heatsink working? Does it actively feel cool to the touch when you heat up the nozzle? Is your fan for the heat sink actually on?
Hmm, ok that means nothing is really wrong with your hotend itself, there's extruder problems. Most commonly, that means you're just not getting enough torque. Make sure your bearing that is pressing the filament into the drive gear is TIGHT. You basically want it crushing the filament, but then back off some. However, clicking indicates that the grip is good, otherwise you would see stripping.
The reason your motor clicks is because there is too much backpressure in the nozzle and the extruder can't push plastic out even when its pushing as hard as it can go. Well, first thing to do is up the temps, really crank that shit up to like 230C, maybe 240C. That'll make sure the filament is getting melted really fast.
Still having issues after upping your temps? Try increasing your motor's voltage. This is basically last ditch effort. https://www.youtube.com/watch?v=bItYRMLGoVc Here's a handy video guide by the best 3d printing YouTuber. Do not up your voltage so much that the motor is hot to the touch, I have read that the heat of the motor can actually cause issues with the creation of the magnetic fields that causes motion and decrease your torque instead of increasing it due to the temperature.
Try different filaments, I know from experience that difference filaments create different back pressures and need longer times to melt down. So try some different filaments and slow down your print speed. The plastic needs time to melt! The more time you give it, the better off you'll be. 30mm/s is snail speed, but give it a shot for the sake of troubleshooting.
Check your bowden tube length. The shorter the better, if you can cut it shorter, do so. Also make sure the filament flows freely between it. You might've noticed a trend here, but the filament needs absolutely as little forces restricting movement as possible. You basically want it sliding on ice all the way up until it hits the brass in that nozzle to melt and be extruded.
Still having issues? Buy a big ass motor that puts out shitloads of torque. https://www.amazon.com/Stepper-Bipolar-4-lead-Connector-Printer/dp/B00PNEQKC0/ref=sr_1_2?ie=UTF8&amp;qid=1498240425&amp;sr=8-2&amp;keywords=nema17
That guy has 60NCm of torque, that's probably double if not 3x what you have now.
If after ALL of that, you're still seeing jamming, go buy a genuine E3D hotend, you'll thank yourself later.
> Want to buy some electronics? Cheaper on Amazon
If you're talking about electronic components... they come with no documentation and are likely shit-crap from China.
99% of the time, I can find an American manufacturer that sells better crap than Amazon. Take for instance the L298 H-Bridge. This one from Pololu taking advantage of a TI-chip (DRV8833) is way more efficient (lower Vcesat) AND cheaper than the L298 bridge on Amazon.
The Pololu module has well-written blog-posts as well as American tech support who I can call / email for assistance. American made can be cheaper AND higher quality.
I know some American companies sell high quality stuff on Amazon, but the Amazon market is so flooded with Chinese Alibaba undocumented cheap-crap that they're an awful site for electronics. Most of the cheap sites (Alibaba, Amazon, Ebay) also is well known to hold counterfeit parts.
If you want cheap and don't care much about quality control, you either need to start looking at the branding (there are some high-quality Chinese companies out there) and you need to do your research.
If you're less concerned with quality, Amazon still has inflated prices over dedicated far-east electronics shops like Taydaelectronics.com (which still has to rely on their own branding: so I trust Tayda over most Amazon sellers). Thailand-made, which has better relationship with the US.
I'm very happy with my CR10S, but less so now that I saw the 10S pro lol. The pro looks soooo sleek, I think you made the right call! I'm looking at all my wires, no-abl, and separate psu/computer thingy and am a bit jealous of your pro's form factor. I would have gone in an extra 150 if it was available when I pulled the trigger. The Capricorn's a nice touch and all but its only 15 bucks or so.
I am quick to recommend stepper dampers, they make a huge difference in sound. I'm less familiar with the pro, esp the y axis. Check that these are the right size. They also aren't needed on the two z axis motors. https://www.amazon.com/gp/product/B07415B39B/ref=oh_aui_search_detailpage?ie=UTF8&psc=1
is what I have, and also just ordered some of these to test out https://tiny-machines-3d.myshopify.com/products/stepper-dampener
You kinda nailed it, the pro has a lot of stuff you'd buy already included. Make sure to get some filament! I thought I'd use what came with the printer, but I've found eSun PLA Pro to be easier to work with and troubleshoot out of the gate.
Very very cool!
I actually didn't know what I wanted to build first, I'm a software engineer so I was exited to actually write some software and see an object moving hahaha, so eventually a Car came to mind, since it's fun to see it go and move around.
So, to start I looked in amazon for a chassis and wheels and I found this kit that looked pretty simple and functional, so I got that, and then since it only brings 1 motor, I got this to be able to move to the sides, at this point I had no idea how to make that work, but I just figured stuff up on the go, I didn't know how to move the motor so I searched for youtube videos and found out that I needed a motor controller again, amazon was my best friend haha, I also got this battery.
After that I was able to make the Car run, the problem was, I needed some kind of way to guide it, because randomly moving around wasn't that fun, so I came out with the design of the robot looking around I found this module and it was just what I needed, I had a few servos and other components from a mix kit that I got with the Arduino, and I used that (and my girlfriend's help with deciding where to put the pices to make them look nicer) to build the robot that you saw on my first post and then I used this BT module to build the manual mode that you can see in my second post and you know the rest of the story, I'm not sure if I missed something, but let me know and I can answer any question :)
What I would recommend is to pick up a 5x7 LED dot matrix display to play with while you wait for the flip dot display to show up. It doesn't look like Adafruit or Sparkfun stock any but here is one currently in stock on Amazon: http://amzn.to/1U2RuhC
The benefit of a LED matrix is that it will allow you to setup a lot of your main code while not having to worry about how to power the actual flip dot display. Once you have your code working to control the LED matrix, making the jump to the flip matrix should be very simple :)
In regards to actually powering the coils, I can't say I have experience with working with these however from my understanding you will most likely need to fabricate a custom controller as you need to have the ability to flip the polarity on each dot to flip the actual dot! The easiest way to do this would actually be to use an H-bridge or motor driver. To continue with the amazon fashion, here is a simple breakout that would be able to control 2 of the dots: http://amzn.to/1UJXb2S
If you have any questions let me know!
EDIT:
I realized I didn't explain why you need the motor drivers to control this. Each little flip dot can actually be thought of as a small little solenoid such that when you apply a DC voltage in one direction the dot will flip one way, when you apply the opposite DC voltage the dot will flip the other way. This is achieved using an inductive device, which can cause extremely high current spikes which will damage any microcontiolller pin directly connected.
The motor driver IC/module is designed to drive these inductive loads, however a little care still needs to be taken make sure that you do not damage the flip dot display or motor drivers. When flipping a dot, it is important to note that you should not constantly apply a voltage but rather just send a pulse long enough for the dot to flip. If a constant voltage is applied it can cause either the flip dot or driver to heatup which is what would in turn cause damage to either of these parts - not good!
Interestingly enough, I just pulled a failed Li-Ion battery from a small R/C plane that would be just about the right size for a rodent car. Image
So that's a 3.7 volt battery with a capacity of 250 milli-amp hours. We can fudge this number and say between both a slightly larger pack and advanced miniaturization, they use a 400mAh battery in a theoretical rodent-sized vehicle.
Now our drivetrain- A cellphone vibrator motor is about the size of motor you'd be able to use. It'd have to be a single motor with a gearbox driving the two front wheels, most likely, as I can't imagine managing to build a multi-motor drivetrain that's not going to fry your battery and they really don't need all wheel drive in Little Rodentia anyways.
So as we can see, that motor there uses 3v at 0.2 amps (200mA). With a good gearbox reduction, probably should be enough power to accelerate a vehicle that weighs less than 300 grams at a decent clip. But that's getting into a ton of force calculations that I reallllllllly don't want to do at the moment.
ANNNYWAY- we never want to draw 100% of our battery's capacity, because not only is the last 15% not usable due to low voltage, it's bad for the battery's longevity and a good way to overheat it and cause a short, leading to fires and death. Not good. So we should use, say, a 25% capacity buffer (Li-Ion should handle a 75% depth-of-discharge easily enough), so our 400mAh battery now becomes a 300mAh battery. Alright. That's how much energy we have available to us. Tack on a few milliamps for accessories and lighting, plus 5% conversion and discharge inefficiencies, and say there's about 280mAh available to the motor.
At "full" load, the motor should use 200 milliamps. In practice, it's going to use much more when accelerating (probably close to 275mA) and much less while cruising (maybe 100mA or so.) But as a running average, let's just call it a day and say the damn motor uses 200mA during normal driving. Yes, I'm a lazy engineer, so sue me.
That means the motor should be able to run for about an an hour and 24 minutes continuously. Again, fudge a safety factor in for heavy acceleration in city driving and other inefficiencies in the gearbox and wind resistance and other shit that I haven't totally accounted for, and let's just say you can get an hour of safe runtime out of your little electric rodent car. Sounds pretty good, yea?
Now, let's convert that to actual range. Let's pull some more numbers out of my ass, and say the tires on this car are 1cm in diameter. That's a circumference of 3.14cm, so the car can travel 3.14cm per rotation of the tire. The motor I linked has a free-speed of 1100rpm, but with a load on it (assuming the final gearbox stage is 1:1) it'll probably be closer to 1,000rpm. 3.14 time 1000 is 3,140cm per minute, or 28 meters per minute. In conventional terms, that's 1.88kph or 1.1mph. Being able to run the motor for about an hour means our equivelant range is also 1.88km or 1.1mi. That's probably not too bad in Little Rodentia, but for getting anywhere else that's a bloody slow ride to get not very far. And if you look at the scenes where we see rodent cars, both in LR and driving along the street where Nick is walking, 1.8kph probably isn't too far off from an average speed.
With this information, it's probably safe to say that there's no "one-car fits all" in Little Rodentia. our little theoretical car here would work just fine in LR which probably isn't even half a kilometer in it's longest dimension, but you'd need a different, much faster car for driving anywhere outside of LR. This makes the subway and/or pneumatic tube idea much more palatable for long distance transportation, since they can just zip along a nice, sealed tube at 40mph and be on the other side of the city in less than half an hour.
***
...Good lord that comment turned into a monster. Then again, I just got a new keyboard and love typing on it, so maybe that contributed to it's length... lol. I'm gonna go clean the house now.
I really feel like the auto bed leveling isn't that necessary. I level my bed every once in a great while, more because I've jiggered with the printer and feel like it might be out of whack than any pure necessity. It really does seem to maintain level pretty well with the stock glass bed.
The CR-10 and CR-10 mini are mostly the same, I think the only real difference is the bed/frame dimensions. The mini is a pretty solid little printer, most of the upgrades are quality of life improvements more than anything.
I did a 7 hour print last night after adding the damper. It had a bit more stringing than normal, but I'm mostly going to attribute that to running too hot. The print was beautiful. No real issues to say.
I picked these up from Amazon: (3 pack) NEMA 17 Steel & Rubber Stepper Motor Vibration Damper + M3 Screws - CNC, 3D Printer https://www.amazon.com/dp/B07415B39B/ref=cm_sw_r_cp_apa_DlOUAbCFSFHGV
They seem pretty good quality and fit perfectly.
H-Bridge (for the UNO there are also shields)
Sensors e.g. this / that though you can also get tctr5000 modules for cents elsewhere.
And note that if you are not set on a line-follower, the kit you've chosen already includes the ultrasonic distance sensor which is nie for robotic projects as well :-)
Do you have a soldering iron and multimeter? Even a cheap $4 multimeter is fine for low-current & low-voltage tasks, and makes your life easier (checking voltages, connections, resistor values...)
As for a soldering iron, even a $1 will do (if it doesn't burn down your house ;-) ) - but an adjustable temperature one will be more worthwhile. Even a $20 soldering station will do to get started if you don't want to spend $80-$100. I tried to avoid soldering for years, and it was a big mistake. It's actually easy and useful.
And another note: The 2wd and 4wd chars will not always go in a straight line. Motors don't run 100% in sync, even at the same voltage.
With a rotary encoder you can ajust the speed in software. You can use one of those IR reflective sensors modules, or a gap sensor, or even a hall sensor... example
You can also get 2wd kits example, but overall, they aren't as great of a value (and as you can see, they just include the standard modules)
A "sensor shield" like in that kit is nice though as it reduces the wiring chaos a bit :-) They cost $1 for the UNO at Aliexpress, probably more expensive at Amazon.
I gotta agree with /u/The_Bringer_of_Bacon on this one.
I have those from Amazon on my Monoprice, and when I got my dampeners from TinyMachines I was quite impressed by the quality.
These things ship with differing rubber, some are stiffer than others.
They have to be "married" to the use. Too stiff and they don't dampen. Too soft and they sag & wobble.
The ones from Tiny Machines seem to be the sweet spot, they did their homework. :-)
Hey /u/priestwithknives - Tip for posting Amazon links - The way you posted (grabbing the whole URL) often stops working after a while. The proper way to do it (and much shorter) is to copy from the item number to the beginning, like this:
Right:
https://www.amazon.com/Rubber-Stepper-Vibration-Damper-Screws/dp/B07415B39B
Wrong:
https://www.amazon.com/Rubber-Stepper-Vibration-Damper-Screws/dp/B07415B39B/ref=sr_1_4?ie=UTF8&amp;qid=1522213043&amp;sr=8-4&amp;keywords=stepper+damper&amp;dpID=41qzlY8DIyL&amp;preST=_SX300_QL70_&amp;dpSrc=srch
All the cr*p at the end is unneeded, left from the search. Just look for the ALL CAPITAL LETTERS PART NUMBER like B07415B39B in this case, it's always caps, then copy to the start.
Later Buddy! :-)
PP
They're trying to using tuning to try to make 1.8* steppers produce the quality that 0.9* steppers are producing naturally. Actually, the biggest improvement can be made by upgrading to Moons 0.9* steppers and then tuning it, but close to the same improvement can be realized by just go with the much cheaper Stepper Online 0.9* steppers: https://www.amazon.com/gp/product/B00W98OYE4
Maybe going to a 0.9* steppers on the extruder can also help, but I can tell you from first hand experience that going to 0.9* steppers on XY makes the VFAs almost entirely disappear.
The steppers I linked are less than $20. Buy one and try installing it on your Ender and see if you see any improvement.
Haha it was a pretty simple build. I bought these (https://www.amazon.com/uniquegoods-Digital-Display-Controller-Stepless/dp/B00QLYO7XU) off amazon. All I had to do was build the box, swap out the potentiometer knob with a longer one that would fit correctly for my dimensions, and fire it up. One huge improvement I made to the new one from my old stir plate was using washers to space the magnet from the fan. I found before that the magnet would freeze the fan from spinning unless placed just right.
you can get the vibrators from amazon as cellphone replacement parts. Maybe look into the linear ones i did buy a few recently here in Germany and they should be perfect for your project. Like this One
I found a nice breakout-board on sparkfun (Link!) it works from 2.5V up to 5.5Volts and should have plenty of power to drive the motor.
you could even use a 3V button cell battery, well you may have to use 2 of them in parallel to get a sufficient current but you should be able to figure that out on your own.
I guess you have th necessary tools from your mechatronics Time?
You probably need a small multimeter and a soldering iron.
some wire and the button cell holders.
By the way. I'am using Cynaps Bone conducting Headsets when i driving my car. Ive heard a few stories of people that could regain there hearing with these Transducers. basically the same thing you are trying to build but commercial. Here is a link if you want to try it.
Good luck!
Yes the fan A header on the board is software controlled and not really suitable for being used to cool the v6 unless you leave it at always 100%. Wire it to your part fan and you will be fine. Alternatively, if you're lucky and your fan B header works and you can just plug into that instead. I shorted out my fan A header and had to go with wiring in two of these for my cooling needs: https://www.amazon.com/gp/product/B00N30UK2M
your in luck, I'm looking at 4 arduinos right now and literally just did some arduino coding yesterday :).
So I actually used something like these for color changing leds,
https://www.sparkfun.com/products/11450
Basically you just give them power and they change automatically. I gave them paper wings but that's not necessary. So what I would do is get a bunch of those and wire them up on some fishing wire. Not sure if that would be ideal though, hmmm.
Regarding motor, you can use anything really. Here's one,
http://www.amazon.com/15RPM-Shaft-Torque-Turbine-Geared/dp/B00EDMIH7E/ref=sr_1_3?ie=UTF8&amp;qid=1416102606&amp;sr=8-3&amp;keywords=gear+motor
But I'd honestly stay away from motors to start, it makes it too complicated. At least a motor with strings, because it's fragile and you have to worry about people touching them.
Another very cool effect is bouncing laser pointers off of mirrors. You can do some cool stuff with a laser pointer and a package of these http://www.amazon.com/Round-Mirror-Craft-Projects-Mosaics/dp/B0028BVL2A/ref=sr_1_12?ie=UTF8&amp;qid=1416102750&amp;sr=8-12&amp;keywords=small+mirror.
For sure! The best thing about the Arduino platform how versitile it is.
Do you have any sensors to play with?
I'd recommend buying one of those huge sensor bundles on Amazon or AliExpress and just playing with all of them. [There are tons of them!](
https://www.amazon.com/gp/aw/s/ref=is_s_ss_i_0_11?k=arduino+sensor+kit&amp;sprefix=arduino+sen)
Another really fun thing to build is an obsticle-avoiding rover. You can grab really cheap robot chassis on Amazon along with the Hbridge and sensors.
Here is an awesome cheap chassis with motors and battery box https://www.amazon.com/dp/B01LXY7CM3/ref=cm_sw_r_cp_awdb_7rbszbCNNF6NA
You'll also need an H-Bridge for the motors
https://www.amazon.com/dp/B014KMHSW6/ref=cm_sw_r_cp_awdb_wubszbDX3Y6BR
An ultrasonic sensor for obsticles https://www.amazon.com/dp/B01M13S26V/ref=cm_sw_r_cp_awdb_Jvbszb0HNDB95
You may also want a mini breadboard and a small USB power bank for powering the arduino. (The H-bridge does have a 5v output, but I've never gotten it to work with 4AA batteries.) You could probably splice the 6 volt line from the battery box to the Arduino Vin pin and the H-bridge Vin, but that's up to you.
Most of these things can be found on AliExpress too, if you'd be willing to wait a little longer for cheaper prices.
The Long:
-
I'm currently designing a core xy printer, the build specs for the machine are (LWH) 26"x26"x24" with a printing area 20"x20".
I'm stuck on designing the Z axis and would like to use two motors, I wanted to use a smoothie board for this project but this build requires 6 motors and thats where this issue starts. I'm aware that you can wire external stepper drivers but with all the talk about micro stepping I don't have the slightest clue on what I need If I were to go that route. I'm just really against spending that kind of money and having to hack it before I can use it.
I've seen people use pulley systems with one motor(how much torque do you need for that style application) and people using stubby stepper motors and wiring them together.
The heated bed is 18"x18" and I first designed a 20x20 aluminum build plate but started to wonder about warping and weight, I want to use glass as the actual printing area but designing the carriage is still on the drawing board.
The short:
-
So here are my questions:
If I wanted to use a smoothie board what and where would I find the stepper drivers needed? Motors I would like to use.
-
Why does it seem the standard of Z rod is 8mm? I remember reading somewhere that it has to do with the millimeter per degree of turn?
-
If I wanted to use 10-12mm z rod is there any cons to doing that other then overkill?
Here's an album of the design progress for those interested. The frame is designed around 20x60mm v-slot from open builds.
These are pretty simple to install.
I also really like switches like these but they're a bit more involved to install.
I just make a habit out of checking them all the time, but these are pretty simple ways to make sure everything runs as little as possible.
You can't just get a dimmer switch. You need something designed for AC motors.
I used this device from Amazon:
KB Electronics 8811006 Solid State Variable Speed AC Electric Motor Control, 2.5 Max amp, 115V, # K177-1002 https://www.amazon.com/dp/B000F9B712/ref=cm_sw_r_cp_api_qikOybXCARJ2H
To control the speed of a bathroom vent fan that I use as a cooling fan for a closet full of computer stuff. It quieted the fan down and still maintains a good speed.
Worked really well for me.
Parts list:
Motor and drive train combo: 2 x 550 30000RPM Gearbox with 12V Motor,Electric Motor with Gear Box for Kids Electric Cars and Motorcycles High Speed RS550 Drive Engine Match Children's Ride on Cars https://www.amazon.com/dp/B076Q3XTWB/ref=cm_sw_r_cp_api_i_PiZADbZK937A2
Transmission to wheel adapter: Transmission Gear External Gear Accessories Connect Gearbox Motor and Wheels for Kids Powered Ride-Ons, 550 Gearbox Accessories Kids Ride On Car Replacement Parts E https://www.amazon.com/dp/B076HW2W98/ref=cm_sw_r_cp_api_i_TlZADbWF68M45
Variable speed controller: RioRand 7-80V PWM DC Motor Speed Controller Switch 30A https://www.amazon.com/dp/B071NQ5G71/ref=cm_sw_r_cp_api_i_LjZADbQSB11QY
Connectors: Amass 10 Pair XT60H Bullet Connector Plug Upgrated of XT60 Sheath Female & Male Gold Plated for RC Parts ... https://www.amazon.com/dp/B074PN6N4K/ref=cm_sw_r_cp_api_i_nkZADbG4NVM0E
Spade connectors: Supco T1112 Quick Disconnect, High Temperature, 12-10 Gauge, 1/4" Female Tab (Pack of 15) https://www.amazon.com/dp/B0071NC78C/ref=cm_sw_r_cp_api_i_olZADbX56T2WB
Battery terminal: https://www.ereplacementparts.com/contact-plate-holder-p-154719.html?osCsid=ijjl2im5cg4p7n3dm3k1cbpjv6
Voltage meter: MICTUNING MIC-VM DC 12V LED... https://www.amazon.com/dp/B078LVLHNF?ref=ppx_pop_mob_ap_share
Note: no affiliate links. All straight links!!!
This all started off with my wife saying that Lightning was a little too slow! I said no problem I got this.
So my first step was to investigate what was the best way to go about this. After a while of researching the best way, I realized that they are more or less oversized versions of my rc cars that I race. With that in mind I was able to do everything.
I started the conversion using just one of the motors. This was so I could make sure I was mentally doing it all right. While the transmission was close to the stock one, it was not a exact fit. I ended up having to trim away some extra plastic and make the opening larger.
Now that the motor and trans is in for the right side I had to start looking at the wiring. The wiring that is in there stock was 18 gauge and while technically will handle the 18v I wanted to be sure we did not melt any wires. I swapped it out one by one using the same 12 gauge wire I use in my RC cars.
The first wires I did was the battery connector. I found the connectors online and used a epoxy putty to make the socket. This ensures the connection is good to the battery.
I then proceeded to replace wires in the harness one by one till they were all replaced. Once it was all setup stock it was time to add in the speed controller. This allows me to turn the speed down (by adjusting the voltage.) I put it online between the battery and the rest of the wire harness. I did it here because it was not able to handle flipping the polarity for reverse. (Popped a fuse finding that out lol. )
Once this was wired up I was able to add in the “fuel gauge”. I put it in what is the “gas cap” on the car. This is a simple dc voltage meter. Nothing fancy here.
Once all that was wired. I needed to make a “Y” splitter for the motors. I know this puts them in parallel all the time and down the road I might change that but for now just forward and reverse was good enough.
Since this car was a single drive motor previously I had to completely make a new hole for this second motor. This was a bit simpler then making room for the first motor.
One thing to note on wiring the second motor. You will want to do it in reverse of the first one as it is spinning the opposite direction of the first motor.
After this was done they only thing I did was relocate the dial for the speed controller from on the speed controller to on the back of the car under the rear fender. This was so I can adjust it without having to remove the seat to adjust it. One thing I may still add is a master power switch. I know this car has one but due to positioning I had to put the battery meter before that switch.
One thing that is still a work in progress is I bought a mltoys brake reduction system. The problem is I was not sure which wire it should go to. This is not the typical plunger switch gas peddle. It is a 6 poll rocker switch. Once they get back to me with that I will get it installed so it is not as jerky on starts and stops.
I just installed mine and yowza that is a world of difference! Now practically all I can hear are the fans, mostly the hotend cooling fan.
I have the petsfang printed but I didn't feel like soldering the wires today. Perhaps tomorrow.
In case anyone wonders, I ordered this 5 pack of dampers from Amazon that came with screws. I'm sure I could have found them cheaper elsewhere, but they arrived quickly and work perfectly. I ordered more in case I needed an extra for the Y axis or the extruder, and perhaps to use on my other printer.
Already answered a similar comment with some questions so I'll just copy and paste them for you to make it easier.
Thanks for the recommendations. So I plan on buying these two items:
https://www.amazon.com/gp/product/B00PNEQKC0/ref=ox_sc_act_title_2?smid=AWQBCGWISS7BL&amp;psc=1
But the guy above said I need a 24V supply. They seem to vary wildly and I have no clue what I need, like I said I'm very new and this kit is my only experience. Should I get this?
https://www.amazon.com/Excelity%C2%AE-Charger-Supply-Switching-Adapter/dp/B01GGAELKC/ref=sr_1_5?keywords=24v+power+supply+arduino&amp;qid=1555342594&amp;s=gateway&amp;sr=8-5#customerReviews
or would something smaller like this work just as well?
https://www.amazon.com/dp/B072JM6SWT/ref=psdc_10967101_t1_B01GGAELKC#customerReviews
And lastly will I need to order any other parts or take anything else into consideration for this new stronger power supply?
Hi! If you're a big DIY person, I found these companies on Amazon called Top Greener and Enerlites where you can install your own light switches. The one that I have all around my house are motion sensor switches and the fan/light timer. So far, I've noticed my bill has gone down. I think it's good because when you program the lights, they basically turn off themselves. Anyway, I'll provide the links if you're interested so you can make a better decision.
https://www.amazon.com/Enerlites-Programmable-Lighting-Vacation-Daylight/dp/B00TSU5GB6
https://www.amazon.com/TOPGREENER-TSOS5-W-Single-Pole-Fluorescent-Incandescent/dp/B015G8VLNA
https://www.amazon.com/Enerlites-Countdown-Ventilation-1-5-10-15-20-30-REQUIRED/dp/B00IB0ZJXE
Check out the Thermaltake Riing Trio. They're quite expensive, but they are the only fans I know of that are in direct competition with the LLs while remaining Aura Sync capable. In my opinion, the Thermaltake fans look a lot better than the LLs too, especially in situations where you would be seeing the back of the fan. To use Aura with these, you'll need a TT Sync Controller to go along with the fans.
So - here's a pic (kind of rough but you get the idea) here:
http://imgur.com/RA0FmY1
the center is a flat piece of something (rigid, cardboard, whatever) and then mount the motors (in opposite directions). Those are then connected to the power-packs (makes it easy to turn on and off and allows you to have counter-directional rotations).
Motor:
https://www.amazon.com/15RPM-Shaft-Torque-Turbine-Geared/dp/B00EDMIH7E/ref=sr_1_1?ie=UTF8&amp;qid=1494449133&amp;sr=8-1&amp;keywords=12v+15rpm
Power switch:
https://www.amazon.com/Pair-Battery-Holder-Storage-Switch/dp/B00FHJTOVU/ref=sr_1_6?ie=UTF8&amp;qid=1494449495&amp;sr=8-6&amp;keywords=9v+battery+pack
You could then encase that in your center section, extend the motor drive shaft (a dowel, etc.) A lot of this depends on how large the fins are going to be and how heavy the material they are made of (light vs heavy). Hope this helps as an idea.
those thermaltake ring trio fans are pretty sweet, only fans i can think of off hand. https://www.amazon.com/Thermaltake-Software-Addressable-Radiator-CL-F072-PL12SW/dp/B07FWJ1GHT/ref=sr_1_1?keywords=ring%2Btrio%2Bfans&qid=1565263696&s=gateway&sr=8-1&th=1
Thanks!
I have n channel that will do for now, but ideally I would like a smoother on/off transition. Do you have any links for self contained modules or is this something I need to make myself?
I would be looking to deliver 2-10amps voltages under 20.
Update
I was looking at the following for starters. I can hook up my generator and PSU to it
https://www.amazon.com/Qunqi-Controller-Module-Stepper-Arduino/dp/B014KMHSW6/ref=mp_s_a_1_10?keywords=h+bridge+module&amp;qid=1570973047&amp;sprefix=h+bridge&amp;sr=8-10#
People will be able to chime in on specific fans but a generic trick with fans to lower the noise is to just run them at a lower voltage.
For 12 volt fans you can pick up a lm2596 buck converter module and dial in the voltage taking fan noise and temperature in to account. They are so cheap that you should buy more than one (they are so cheap because they use a counterfeit chip. I get them for free from Texas Instruments as engineering samples and the price per 10,000 is more expensive direct from TI just for the lm2596 chip itself rather than the whole eBay module in units of one).
https://www.ebay.com/sch/i.html?_from=R40&amp;_trksid=m570.l1313&amp;_nkw=lm2596&amp;_sacat=0
For smaller AC motors/fans you can just use a light dimmer to adjust the speed. Special dimmers are made for this specific purpose (inductive loads).
https://www.amazon.com/KB-Electronics-8811012-Variable-K177-1005/dp/B000F9DAL2/ref=pd_lpo_vtph_60_bs_t_2?_encoding=UTF8&amp;psc=1&amp;refRID=3FG45AKA29Y851BKQ8G4
Also, mechanic isolation of the fan from the bucket/tub will help with noise. Foam rubber tape can be used.
Printer: Powerspec/Wanhao Duplicator i3
Mods (some wholly printed, some partially printed and partially purchased, some wholly purchased), in no particular order:
Prints featured:
I would use this stepper motor:
STEPPERONLINE Nema 17 Stepper Motor Bipolar 2A 59Ncm(84oz.in) 48mm Body 4-lead W/ 1m Cable and Connector compatible with 3D Printer/CNC https://www.amazon.com/dp/B00PNEQKC0/ref=cm_sw_r_cp_api_i_-9iTCb0Y9Z8Z1
It will easily be able to move a pair of scissors with enough strength and be able to do it quickly. This motor is extremely versatile and once you’re done with this project you’ll be able to use it for other cool projects as well. I’m using the DRV8825 motor control:
https://www.pololu.com/product/2132
PWM'ing and swapping polarity is bad news for trains with onboard control computers, but I might not fully understand the setup you're describing.
This will work for any system that uses two rails to power a motor. I'm sure there are some exceptions out there but any model train that runs when you put DC voltage across its wheels is probably a good fit.
FWIW here's the H-Bridge I bought. http://www.amazon.com/gp/product/B00CAG6GX2/ref=oh_aui_detailpage_o02_s00?ie=UTF8&amp;psc=1
I put a pair of these in my house, they're great and pretty cheap.
Sounds good.
I'm returning all the Corsair stuff I bought during prime day (Commander pro, fans etc) and going with Thermaltake Riing Trio 12 RGB TT Premium Edition 120mm Software Enabled 30 Addressable LED 9 Blades Case/Radiator Fan - 3 Pack - CL-F072-PL12SW-A https://www.amazon.com/dp/B07FWJ1GHT/ref=cm_sw_r_cp_api_i_6-ipDbNN8SHRA
I don't want to be locked in Corsair ecosystem and want to leverage the motherboard directly.
Hopefully everything works as intended.
At its simplest all you need is a motor with something lopsided on the shaft, which you could theoretically build from scratch. However there are some good quality low cost ones on amazon for a few USD under the uxcell brand, which I have had good experiences with (but with other products). Like this for example.
What are the dimensions of the space inside the steering wheel?
https://www.amazon.com/uxcell-3100RPM-Vibrating-Vibration-Massage/dp/B00AKWRWRW/ref=sr_1_7?ie=UTF8&amp;qid=1478586664&amp;sr=8-7&amp;keywords=vibration+motor
https://www.amazon.com/1-5-6V-50000RPM-Coreless-Vibration-Motor/dp/B00QC2F4FQ/ref=sr_1_5?ie=UTF8&amp;qid=1478586664&amp;sr=8-5&amp;keywords=vibration+motor
https://www.amazon.com/1100RPM-0-2A-Speed-Vibration-Motor/dp/B0087Y95X4/ref=sr_1_3?ie=UTF8&amp;qid=1478586664&amp;sr=8-3&amp;keywords=vibration+motor
but also if you can't find something small enough to fit into the compartment and powerful enough to shake the wheel you should consider putting several of the phone vibrators in parallel around the steering wheel itself.
No major strain on the fan, it just lowers the voltage, not perfect but probably not going to set a fire pulling .3a. I use them on my RC cars for LEDs and stuff. This is the one I have used many times on different projects. It takes 12v and lowers it to either 6v or 5v, up to 3a. I had it at 6v first, but I could feel blowback so lowered it to 5v. Works perfect and is whisper quiet.
No cant be used as a speed controller. It's constant output. If you want to adjust speed, you want a PWM like this. That will allow you to adjust the speed. The good thing about PWMs are they dont lower voltage, they lower the pulse width.
The double layer hammocks, are a good call if you are looking for bug protection, mosquitoes can bite through a single layer. I use a Warbonnet Blackbird XLC. It is a wonderful hammock that lets me lay flat or even on my side.
As tarps go, I use a Hennessy hex fly on a continuous Ridgeline, attached via prusik knots. I attach the ridge line to the trees using figure 9s. I also suggest using snake skins with the tarp.
I can get my entire setup hung in about 4 minutes. Which comes in handy when it's getting dark or about to rain.
www.warbonnetoutdoors.com/product/blackbird-xlc/
Hennessy Hammock - Hex Rainfly - Rain Tarp (Coyote Brown) https://www.amazon.com/dp/B0094NLB8E/ref=cm_sw_r_other_apa_9h8Dyb7TDZXRZ
Nite Ize F9L-02-01 Large Figure 9, Black https://www.amazon.com/dp/B001HN6CWY/ref=cm_sw_r_other_apa_3e8DybE1QPP2A
> pulse width modulation, look for a PWM DC motor control
Oh Crikey! I've got one of those around here somewhere.
EDIT: Found it. Whoo-hoo! Thanks for the answer! This is what mine looks like: https://www.amazon.com/RioRand-7-80V-Motor-Controller-Switch/dp/B071NQ5G71/
Yeah, I basically want to have something that can range from 0-100% (or close to it) duty cycle.
This one here says it'll go from 0-100%. And this one says it'll do ~1-100% duty cycle.
Is that a lie? Will it be more like 98% or something?
I used this for our bathroom fan. Max is 30 min.
Enerlites HET06A-White 1-5-10-15-20-30 Minutes Preset In-Wall Countdown Timer Switch, w Decorator Wall Plate, White https://www.amazon.com/dp/B00IB0ZJXE/ref=cm_sw_r_cp_taa_wucvDb16G0QPJ
Tire of the kids leaving the fan on all day and night. Didn't want to heat or A.C. the outside all the time. Went in quite easily.
If the motor is a shaded pole motor, which if it's a cheap fan it probably is, you can reduce the voltage to the motor to slow it. One solution is a light dimmer. You might find however that the fan may not turn on if the speed setting is low. You then up the speed, then lower it again.
A better solution is this one., or one like it.
A cheap and dirty alternative is to trim down the tips of the fan blades (in diameter) bit by bit until the noise is acceptable. Obviously reducing the fan effect, but also the noise.
I've read that Nema 17 dampers make a big difference. https://www.amazon.com/Rubber-Stepper-Vibration-Damper-Screws/dp/B07415B39B/ref=sr_1_5?ie=UTF8&qid=1540390028&sr=8-5&keywords=nema+17+dampers
I ordered some but they aren't here yet so no first hand experience for now.
Yes!
Raspberry Pi
[RC-CAR] (http://www.toysrus.com/product/index.jsp?productId=11592253&amp;camp=PLAPPCG-_-PID10226513:TRUS&amp;cagpspn=plat_10226513&amp;eESource=CAPLA_DF:11592253:TRUS) I would NEVER spend 40 on this, My wife got it for 15 at target.
Blue Tooth Adapter
WiiMote
Dual H Bridge
These are the major components and there are a few Misc Components needed.
I have the raspberry pi 2 starter kit, so I used some spacers to connection the Dual H bridge to the top of the raspberry pi case.
You'll also need
Power Supply for PI
Power Supply for Dual H Bridge ( I use 11.1 3S poly battery)
Female to Female jumper wires
Any other questions I can go into as much detail as you want.
I am trying to make a small desk fan out of two 12V 80mm computer fans. I am planning to use a DC 12V 1A Power Supply Adapter and just to cut off the end and attach it to this controller. I know the fans require 0.18A each for a total of 0.36. I am planning on simply stripping the ends of the fan wires and twisting them together to feed into the negative and positive motor terminals of the controller. What I am wondering is that if I also take an LED strip and power it from the motor terminal of the controller, will the LED strips still work fine when I twist the knob on the controller to change fan speed? Also, are there LED strips that don't require more than 0.64 amps?
That's absolutely perfect. Just ordered the 4x4. Thanks. That's exactly what I was looking for-- but all my Google searching should have (but didn't) include 'ball bearing.'
To that end: since I've never built a geared assembly before, I was going to try using a worm gear stepper drive, namely, this one (since I want high torque at the expense of speed):
https://www.amazon.com/gp/product/B073S5GM6Q/ref=crt_ewc_title_dp_2?ie=UTF8&psc=1&smid=A36ZH2MCHPKXUA
connected to and driven by this:
https://www.amazon.com/gp/product/B014KMHSW6/ref=crt_ewc_title_dp_6?ie=UTF8&psc=1&smid=A12MRQC2NA7LMA
What do you think?
I'm going to put the links in a comment, I think they caused my post to get removed due to spam filter earlier:
Don't necessarily have to use Amazon, but I'd prefer a US based company.
Thanks!
No, the adafruit PWM board by itself cannot run a stepper motor. It is only capable of producing the signals to drive a motor controller. You will need it to generate ~8 (depending on phases) high resolution PWM signals to run two stepper motors.
For a best performance setup I would recommend this:
STEPPERONLINE CNC Stepper Motor Driver (1/128 micro step) x2 ~$78https://www.amazon.com/STEPPERONLINE-1-0-4-2A-20-50VDC-Micro-step-Resolutions/dp/B06Y5VPSFN/ref=sr_1_3?keywords=stepper+motor+driver+micro+step&qid=1555450028&s=gateway&sr=8-3
NEMA 23 Stepper Motor x2 ~$160
https://www.amazon.com/MOONS-Stepper-Stepping-Cable01891-ML23HS8P4150/dp/B071YZDMPB/ref=sr_1_2_sspa?keywords=nema+23+stepper+motor&qid=1555450115&s=gateway&sr=8-2-spons&psc=1
There are cheaper ones with less resolution (1/32 microstep) and torque like this x2 = ~ $54https://www.amazon.com/Longruner-Stepper-Printer-Segments-LD09/dp/B07FK8NRKL/ref=sr_1_27?keywords=stepper%2Bmotor%2Bcontroller&qid=1555449504&s=gateway&sr=8-27&th=1
&#x200B;
but moving 15lb with a stepper is solidly moving in on 3D printer / CNChardware territory.
You need to calculate how much rotational torque and holding torque your project needs. Then you will know how much stepper you need. Also how much resolution you are willing to pay for.
A 12V Power Supply
Simple PC Fan, 12V
PWM Controller
The wall wart will supply 12V with a max of 1A of current. 12V computer fans of that size use at most 0.5A. The PWM controller will control the fan speed. It works by sending out DC pulses, also known as a square wave, of different lengths based on where the knob is set.
To hook up:
There are 4 terminals on the PWM Controller. Look on the bottom to see the polarity. Should be +,- Power and +,- Motor. They're screw terminals so she won't need to solder anything.
Simply hook up the red fan wire to the Motor + terminal, and the black fan wire to the Motor - terminal.
Next, WHILE THE WALL WART IS UNPLUGGED, splice the cable so you have some copper showing at an end. If it has red and black, simply repeat what you did with the fan but use the Power terminals. If the wires are the same color, you can use a multimeter to figure out the polarity.
Schematic
I have had to do this process for many steppers, so I will try to help you out.
You may have to switch the input wires around till they are in the correct order, but this should get you started.
I've heard mixed reviews on the 'humidity sensor' activating switches. I'd rather go with a nice selectable timer switch, I use something like these:
https://www.amazon.com/dp/B00IB0ZJXE/
dude this has been done lol like, a loooong time ago
https://www.amazon.com/Enerlites-HET06A-White-1-5-10-15-20-30-Countdown-Decorator/dp/B00IB0ZJXE/ref=sr_1_5?ie=UTF8&amp;qid=1541461177&amp;sr=8-5&amp;keywords=countdown+timer+switch
Hi. I graduated as an EE but soldering is beyond me with PD so I might have to ask a friend to build it. The quad buffer has individual /OE pins for the 1V5 motors, I need to do more homework.
UK suppliers
motors
controller
buffer
Yes, the RGB ring is on both sides not just the front like the Corsair LL120s
https://www.amazon.com/Thermaltake-Software-Addressable-Radiator-CL-F072-PL12SW/dp/B07FWJ1GHT/ref=mp_s_a_1_2_sspa?keywords=thermaltake+tt+ring&amp;qid=1556936136&amp;s=gateway&amp;sr=8-2-spons&amp;psc=1
Just grab a DC motor and something like this, wire together and figure out a face plate.
If you have access to a machine shop that will help a lot. If not you'll have to hack things together.
Funny you mention that, I am going to be replacing the regular switch for the fan with this variable timer one
I had a warped bed so I bought a borosilicate bed to fix it. The problem was now my y axis was missing steps due to the added weight. I tried turning down jerk and acceleration but even at setting jerk to 1 and acceleration to 200 it was still missing steps. I decided to upgrade the y axis motor which had 2 benefits. First, I have zero missed steps even at higher than stock acceleration. Second, the new motors are MUCH quieter. I went a head and upgraded the x axis with the same motor and now my printer is very quiet. At $13 each these motors are an awesome upgrade. You do need to splice some wires and as you can see I needed to clearance the bed x brace for the y axis motor to fit. But totally worth it.
Here are the motors I used:
STEPPERONLINE Nema 17 Stepper... https://www.amazon.com/dp/B00PNEQKC0?ref=ppx_pop_mob_ap_share
I'm looking for the stepper motor which can make one revolution in the shortest amount of time possible. In other words, something which can make a catapulting motion. Should I be looking for high torque motors?
I found this one but I'm not sure if it has the right specs for what I'm looking for... Could anybody advise? Thanks!
This is the one that I have: https://www.amazon.com/Enerlites-HET06A-White-1-5-10-15-20-30-Countdown-Decorator/dp/B00IB0ZJXE/ref=sr_1_6?keywords=timer+switch&amp;qid=1550149892&amp;s=gateway&amp;sr=8-6
It works great. The blue led's are fairly bright and would annoy me if my bathroom was attached to my bedroom.
Get the one with the zipper chip and heatsink, that looks like this: https://www.amazon.com/Qunqi-Controller-Module-Stepper-Arduino/dp/B014KMHSW6/ref=asc_df_B014KMHSW6/?
You don't need to buy it from this link, tons of places sell them. This is just to show you a photo of what it looks like.
Guarantee the price will go up now😁
UK link:
https://www.amazon.co.uk/dp/B00PNEQKC0/ref=cm_sw_r_cp_awdb_t1_OKXUCbN6X8BV9
It's also worth noting that, all other things being equal, the number of starts increases the amount of torque required to hold a position (or raise or lower the load) proportionally. So if replacing your Z Axis motor, lean towards the higher torque NEMA 17s, like this guy:https://www.amazon.com/gp/aw/d/B00PNEQKC0/. Measure for fit first, of course.
Try looking into something like this? This way you could rig areas around the board like roads and activate them separately.
https://www.amazon.com/gp/aw/d/B00PZYMCT8/ref=pd_aw_lpo_60_bs_img_2?ie=UTF8&amp;psc=1&amp;refRID=009ZF813Q7G9ZRFGBXBC
Tarp on top would be the obvious suggestion (read that as last item packed, first item out). Maybe utilizing a couple of figure 9's or my old favorite the truckers hitch.
I am using these for a project, and so far I've been really impressed. I don't know the difference between the DQ542MA and DM542T
https://www.amazon.com/gp/product/B06Y5VPSFN/ref=oh_aui_detailpage_o02_s00?ie=UTF8&amp;psc=1
I use these motor drivers with an arduino all the time. Stepper motors are stepper motors - basically read the specs and you'll be happy. Not sure what youre referring to regarding breakout boards.
I use these and they've been going strong for years in my D-bot: https://www.amazon.com/Stepper-Bipolar-4-lead-Connector-Printer/dp/B00PNEQKC0/ref=sr_1_3?ie=UTF8&amp;qid=1517499156&amp;sr=8-3&amp;keywords=nema+17
You could use a PWM motor speed controller like this to fine tune the power and speed of the motor.
Probably would be taken care of with stepper dampeners.
Also, don't mix too much hardener...if it's a 2 part resin, one part is the hardener...if you use too much, what happens is the mixture gets too hot and contracts which causes pitting/bubbles. This was the case when using Fiberglass Resin when I was making custom dashboards and trunk layouts for show cars. Use a little less than recommended, you'd be surprised. Keep it just a hair cool so it doesn't harden as quickly...also the vibrator motor idea as /u/akelis mentioned is smart as hell. Use a pager motor if you can, like this one here.
I got this one. I thought the time selection was better.
I'll warn you that even though I bought buttons from the same manufacturer in the same style, he buttons were extremely different brightness. If that happens for you, I used a rheostat to turn down the power to the light.
this is the one i used: https://www.amazon.com/gp/product/B00N30UK2M/ref=ppx_yo_dt_b_asin_title_o00_s00?ie=UTF8&psc=1
https://www.amazon.com/Rubber-Stepper-Vibration-Damper-Screws/dp/B07415B39B/ref=sr_1_4?ie=UTF8&amp;qid=1522213043&amp;sr=8-4&amp;keywords=stepper+damper&amp;dpID=41qzlY8DIyL&amp;preST=_SX300_QL70_&amp;dpSrc=srch
They make the machine a lot easier to be around and are fairly cheap
^ This. I bought a 3 pack on Amazon for $11.45. They are very easy to install and cut down the noise a lot.
yah you can still buy brand new fan speed controllers that look basically the same
&#x200B;
https://www.amazon.com/KB-Electronics-8811012-Variable-K177-1005/dp/B000F9DAL2/ref=sr_1_8?crid=D14OZQ2Y9WZO&keywords=fan+speed+controller&qid=1571974906&sprefix=fan+speed%2Caps%2C162&sr=8-8
Motion sensors are probably the best way to go, as others have said, but I'll offer a different alternative. This switch has a built-in timer that you can set for 1, 5, 10, 15, 20 or 30 minutes. There's also other timer switches out there, some of which can even be programmed.
Hey, sorry. I just realized I'm putting your plan into action but never responded to it. I'm using a mirror plate with blue tape.
I'm not sure where to find the XY jerk settings on simplify 3D but I'm currently looking for it, I'm going to be printing both brackets once I'm done with printing some squash feet holders, and I'll be ordering an extra stepper for the Y axis motor. (I bought these: https://www.amazon.com/gp/product/B07415B39B/ref=oh_aui_detailpage_o09_s00?ie=UTF8&psc=1 It is currently on my printer now, just waiting for the extra one for the bracket.)
As a side thing, I've seen people with rods attached to the top of the Z axis, to the front of the printer. Do you know what those are, and could those help me?
This print is a large scale test of my newly upgrade D-bot using a Bondtech dual gear extruder, stiffer Z axis using Cbeam and linear rails. I'm printing at 80mm/s, .1 mm layers, .7% infil (grid), 200 nozzle / 60 bed. The model itself is scaled up to 175% I believe and will be about 11 inches on it's longest side. Not sure how tall it's going to be yet (I guess I could check cura when I get home). I also added stepper dampeners to my x/y and my printer is almost silent :)
&#x200B;
This is the Notre Dame model found on MMF:
Thermaltake Riing Trio 12 RGB TT Premium Edition 120mm Software Enabled 30 Addressable LED 9 Blades Case/Radiator Fan - 3 Pack - CL-F072-PL12SW-A https://www.amazon.com/dp/B07FWJ1GHT/ref=cm_sw_r_cp_api_1Rm.BbQK3QEE2
Thermaltake Riing Trio 12 RGB TT Premium Edition 120mm Software Enabled 30 Addressable LED 9 Blades Case/Radiator Fan - 3 Pack - CL-F072-PL12SW-A https://www.amazon.com/dp/B07FWJ1GHT/ref=cm_sw_r_cp_apa_i_blfaCbVXVMZWV
keeping bathroom door closed and a fan timer helped us.
https://www.amazon.com/gp/product/B00IB0ZJXE/ref=oh_aui_search_detailpage?ie=UTF8&amp;psc=1
I thought about doing a sensor fan, but instead decided on a timer switch. It's $18, and I just hit the 30 minute timer when I start the water or turn on the bathroom light. Minimum disruption to existing routine, super simple, no clouds required!
https://www.amazon.com/Enerlites-1-5-10-15-20-30-Minutes-Countdown-Decorator/dp/B00IB0ZJXE/ref=zg_bs_6291360011_3?_encoding=UTF8&amp;psc=1&amp;refRID=JV49D0QGGTRQQFVVQ701
Are these usually listed? Looking at a few on amazon, they don't give a maximum rpm. An example
Yes, steam. I'm going to install a timer like this (https://www.amazon.com/dp/B00IB0ZJXE/ref=cm_sw_r_cp_apa_i_VbcuDbN1N82VX) so I can run it for 20 min after. I failed at calculating cubic feet, not so sure I could figure out how to calculate particle velocity :).
we are currently using this for our project. It is capable of controlling up to 2 motors but we are just using it to control 1 for now.
Check this out at Amazon.com
KB Electronics 8811012 Solid State Variable Speed AC Electric Motor Control, 5.0 Max amp, 115V, # K177-1005 https://www.amazon.com/dp/B000F9DAL2/ref=cm_sw_r_sms_apa_i_AVGODbJV6B4AY
You'll want a motor driver such as this between the motors and the arduino, as the arduino is not equipped to supply the current the motors need.
The actuator runs off 12V and has internal switches to cut it off at each end.
I'm still working on how to drive it. Right now I have a ATX power supply connected to a breakout to give me different voltages I need in the cab. To drive the motor I use a H-Bridge connected to an Arduino.
Right now my plan for my cab to run Linux and Attract Mode. I can call a script each time I launch a game that sets the monitor orientation. I have a test script that rotates it now, but that's not a usable thing quite yet.
One thing to note is that the actuator I used is heavy-duty and slow. There are faster ones, and this certainly does not have to be heavy duty. It takes very little force to rotate.
This is what they are referring to:
https://www.amazon.com/KB-Electronics-8811012-Variable-K177-1005/dp/B000F9DAL2
Your way it will run at full speed all the time, and be extremely noisy. The switch will allow you to control it so it removes the fumes without deafening you at the same time.
Would a few L298Ns work ? https://www.amazon.com/dp/B014KMHSW6
Or a featherwing.
https://www.adafruit.com/product/2927
These? https://www.amazon.com/Rubber-Stepper-Vibration-Damper-Screws/dp/B07415B39B
These are what I have:
https://www.amazon.com/Torque-Stepper-Motor-425oz-Router/dp/B00PNEPW4C/ref=pd_cp_60_4?_encoding=UTF8&amp;pd_rd_i=B00PNEPW4C&amp;pd_rd_r=35Y9S4KD82HKA5H9YX3A&amp;pd_rd_w=0KHvJ&amp;pd_rd_wg=Iq2NL&amp;psc=1&amp;refRID=35Y9S4KD82HKA5H9YX3A
This is what you may be talking about:
https://www.amazon.com/Stepper-Motor-Bipolar-269oz-Router/dp/B00PNEPI0A/ref=pd_sim_469_4?_encoding=UTF8&amp;pd_rd_i=B00PNEPI0A&amp;pd_rd_r=61V9SWJJ3XHTTDF9QDE8&amp;pd_rd_w=1Fgkr&amp;pd_rd_wg=kmipE&amp;psc=1&amp;refRID=61V9SWJJ3XHTTDF9QDE8
Longer Length = More torque = Wider shaft needed
https://www.amazon.com/Thermaltake-Software-Circular-Controllable-CL-F072-PL12SW/dp/B07FWJ1GHT
He using this
https://www.amazon.com/dp/B07FWJ1GHT/ref=cm_sw_r_cp_awdb_t1_6eh0Cb3GYSP2S
Or at least that's what I think.
Here are the case fans from the radiator.
Nema 17 Stepper Motor Bipolar 2A 59Ncm(84oz.in) 48mm Body 4-lead W/ 1m Cable and Connector for 3D Printer/CNC https://www.amazon.com/dp/B00PNEQKC0/ref=cm_sw_r_cp_apa_JNFbzbHZY4JMB
https://www.amazon.com/Torque-Stepper-Motor-425oz-Router/dp/B00PNEPW4C
This is the controller that was used https://www.amazon.com/dp/B014KMHSW6/ref=cm_sw_r_cp_apa_i_uvTUCbXP1QBNX
Here is the link for my driver:
https://www.amazon.com/gp/product/B06Y5VPSFN/ref=oh_aui_detailpage_o01_s00?ie=UTF8&psc=1
Also the power supply is 2.4A. Assuming A is amp
I’ve always heard that if it can hold a square of toilet paper, then it’s working. It could be as simple as it’s not running for long enough, I leave mine off during my shower, but let it run for ~20 min after. You can get a simple timer switch and let it run after you get out.
Enerlites HET06A-White 1-5-10-15-20-30 Minutes Preset In-Wall Countdown Timer Switch, w Decorator Wall Plate, White
Attempting to use a resistors to reduce the speed of a DC motor is ineffective. Specifically, it will not stretch the battery life.
The correct way to reduce its speed is by varying the voltage. Use a DC motor controller.
For example: https://www.amazon.com/RioRand-RR-PWM-15V-Voltage-Motor-Controller/dp/B00N30UK2M
Maybe someone here knows a bit more about electrical work, but could these work together or do you just use one? Originally I thought forward and back was sufficient, but I might want to work my way up to 23RPM than to start with it. With that amount of torque, I don't know if its going to stall, I think it's going to break something else.
https://www.amazon.com/RioRand-7-80V-Motor-Controller-Switch/dp/B071NQ5G71
https://www.amazon.com/Twidec-Illuminated-Toggle%EF%BC%88Quality-Assurance-Years%EF%BC%89KCD2-201N-R/dp/B07MV5LBX8
BEMONOC High Torque Dc 12v Low Speed 2RPM Reversible Worm Gear Motor of Miniature Metal Motor with Shaft 6mm https://www.amazon.com/dp/B01D14QPV4/ref=cm_sw_r_cp_api_i_-azFDbBQFRPM6
Qunqi L298N Motor Drive Controller Board Module Dual H Bridge DC Stepper For Arduino https://www.amazon.com/dp/B014KMHSW6/ref=cm_sw_r_cp_api_i_efzFDb3CHE112
I can send a link to the pwm* I am using it’s a simple unit sends the full 18v but turns it on and off at veering intervals per second to regulate power out put also they tend to fail and go full throttle sort of speak so put a kill switch and make sure tiny knows how to use it
RioRand 7-80V PWM DC Motor Speed... https://www.amazon.com/dp/B071NQ5G71?ref=ppx_pop_mob_ap_share
Hey! I have this same issue right now with my copy. Seems like the rumbles are all about to die! Haha
I'm working on a video about how to fix it (YT:fossilarcade) but I think this is the motor you need. Just need to desolder the faulty on off and replace it with this. I've not got around to it yet, but will carry out some tests and repairs in a few days.
I just added yesterday a glass bed and boy, that bed falling is annoying. Would that stepper motor be a proper upgrade? I've tried to find that 17HS4401, just to find this one that have more torque and isn't that more expensive.
What's the goal of the workshop? To introduce programming? To introduce electronics? Does your target audience already have these basics down and you just want to cover some advanced control system topics?
(From experience these things tend to forget scope and leave attendees confused or bored. Or both.)
If budget isn't an issue and you don't want to focus on hardware buy some Pololu 3Pis: Arduino compatible they can work with C, C++, graphical programming and many languages.
Most of the time budget is an issue. If you're EE, take a look at the Harvard AERobot and build a few, they're pretty simple and cheap. (Or buy some: store link) They came from the Afron challenge:
http://robotics-africa.org/2014-design-challenge
No money and PCBs are too much work? Arduino + scrap electronics. CD drives, computer fans, etc. Or try this chassis, use a cheap motor driver design. I've done a similar workshop with cardboard robots, Arduino derivatives, motors pulled from scrap or surplus and simple IR reflectors bought in bulk (TCRT5000 are 10/$1 on ebay). Using a DC motor, a rubber band and food skewers in plastic straws you can make pulley systems that are cheaper than gearboxes. But these are neat. I didn't want programming to be a drag so we used Ardublock.
[Also: your Facebook group is closed, I couldn't see posts to make more accurate recommendations]
The motor is a Nema 17 with 63.7 oz-in of hold torque.
The drive controller doesn't seem like it has the ability to do micro stepping which I didn't see as a problem because the resolution of it is more then i really need already.
Links to both that i got from amazon below.
The application is raising a skylight, which involves the motor turning a hook which grabs the loop to open the skylight.
As far as I can tell it doesn't have to do with resonance but whenever its not actually moving a step its losing all current. This could be my problem as the drive started to over heat when it was not moving. So at the end of the move I disable the driver because the window doesn't need to be held open.
Motor:
https://www.amazon.com/gp/product/B00PNEQI7W/ref=oh_aui_detailpage_o08_s02?ie=UTF8&amp;psc=1
Driver:
https://www.amazon.com/gp/product/B014KMHSW6/ref=oh_aui_detailpage_o08_s01?ie=UTF8&amp;psc=1
Here's the parts list
Motherboard
https://www.amazon.com/ROG-Maximus-XI-Formula-Motherboard/dp/B07HM3FRBL/ref=sr_1_1?keywords=formula+xi+z390&qid=1566404579&s=gateway&sr=8-1
RAM
https://www.amazon.com/G-SKILL-TridentZ-288-Pin-Desktop-F4-3200C16Q-32GTZR/dp/B01MSBS0UT/ref=sr_1_5?keywords=gskillz+trident+z+3600mhz&qid=1566404983&s=electronics&sr=1-5
PSU
https://www.amazon.com/Be-Quiet-Power-80plus-platin/dp/B00X7VF9UA
Fans
https://www.amazon.com/Thermaltake-Software-Addressable-Radiator-CL-F072-PL12SW/dp/B07FWJ1GHT/ref=sr_1_3?keywords=riing+trio&qid=1566404018&s=gateway&sr=8-3
Tubes
https://www.amazon.com/Thermaltake-Pacific-Lengths-V-Tubler-CL-W116-PL16TR/dp/B01CVOLDTO/ref=sr_1_1?crid=1RV0TJYAN7THI&keywords=thermaltake+tubes&qid=1566404090&s=gateway&sprefix=thermtal%2Caps%2C229&sr=8-1
CPU block
https://www.amazon.com/Thermaltake-Pacific-CPU-Water-Block/dp/B0091CW96Q/ref=sr_1_2?crid=2LHAAOYN8HZAJ&keywords=thermaltake+pacific+w5+cpu+waterblock&qid=1566404130&s=gateway&sprefix=w5+thermaltake+cp%2Caps%2C177&sr=8-2
GPU block (discontinued. Had to buy overseas)
https://www.thermaltake.com/pacific-v-gtx-1080ti-plus-transparent-msi-gaming-x.html
RGB fittings
https://www.amazon.com/Thermaltake-Pacific-Premium-Fitting-CL-W185-CU00BL/dp/B07ND7WW4T/ref=sr_1_1?keywords=thermaltake+rgb+fittings&qid=1566404248&s=gateway&sr=8-1
90 degree fittings
https://www.amazon.com/Thermaltake-Pacific-Adapter-Fitting-CL-W052-CU00BL/dp/B01EE9AP52/ref=sr_1_3?crid=2YNYJJVRFHVLL&keywords=thermaltake+90+degree+fitting&qid=1566404296&s=gateway&sprefix=thermaltake+90+deg%2Caps%2C218&sr=8-3
90 degree compression fitting
https://www.amazon.com/Thermaltake-Pacific-Compression-Fitting-CL-W097-CA00BL/dp/B071YVHLLY/ref=sr_1_5?crid=2YNYJJVRFHVLL&keywords=thermaltake+90+degree+fitting&qid=1566404332&s=gateway&sprefix=thermaltake+90+deg%2Caps%2C218&sr=8-5
Pump/res
https://www.amazon.com/Thermaltake-Adjustable-Reservoir-Certified-CL-W082-PL00BL/dp/B0784BGN6Q/ref=sr_1_2?keywords=thermaltake%2Bpump%2Bres&qid=1566404397&s=gateway&sr=8-2&th=1
Lian li strimer(24 & 8 pin)
https://www.amazon.com/Lian-Li-Pin-Power-Strimer/dp/B07FCLJYVH/ref=sr_1_1?keywords=lian%2Bli%2Bstrimer&qid=1566404435&s=gateway&sr=8-1&th=1
RGB light strip
https://www.amazon.com/Thermaltake-Pacific-Million-Magnetic-CL-O014-PL00SW/dp/B079FVB9TF/ref=sr_1_1?crid=1KQWAYQ0R3MKO&keywords=pacific+lumi+plus&qid=1566404492&s=gateway&sprefix=pacific+lumi%2Caps%2C177&sr=8-1
RGB flow indicator
https://www.amazon.com/Bitspower-Hexagon-Flow-Indicator-Digital/dp/B07BWWBWGY/ref=sr_1_1_sspa?keywords=bitspower+rgb+flow+indicator&qid=1566404532&s=gateway&sr=8-1-spons&psc=1&spLa=ZW5jcnlwdGVkUXVhbGlmaWVyPUEyQTk0VTVVQUhaRjVZJmVuY3J5cHRlZElkPUEwNjg4MjA4MU5YM1lIOFU2T1Y1MCZlbmNyeXB0ZWRBZElkPUEwNzY2NTYwMTNUNk1RVUlGSzVKVCZ3aWRnZXROYW1lPXNwX2F0ZiZhY3Rpb249Y2xpY2tSZWRpcmVjdCZkb05vdExvZ0NsaWNrPXRydWU=
Coolant
https://www.amazon.com/XSPC-Performance-Premix-Coolant-Opaque/dp/B076QJ7M6N/ref=sr_1_1_sspa?keywords=xspc+coolant&qid=1566404891&s=electronics&sr=1-1-spons&psc=1&spLa=ZW5jcnlwdGVkUXVhbGlmaWVyPUEzSE4wTzlIUFI2VzVQJmVuY3J5cHRlZElkPUExMDMyNzA0QlFZME9JQlBRNUVCJmVuY3J5cHRlZEFkSWQ9QTA4NDc0NzExWU45NFRORTZVNFdQJndpZGdldE5hbWU9c3BfYXRmJmFjdGlvbj1jbGlja1JlZGlyZWN0JmRvTm90TG9nQ2xpY2s9dHJ1ZQ==